Drone and UAV Technology Reviews, Articles, News, Build Logs
I’ve been very happy with the latest results of my flight tests with regards to the smoothness of the video and the gimbal performance. The only current issue to resolve is that the arms and propellers are sometimes in the video and photos. The less aggressively the flight, the less the issue occurs.
So the current need is to lower the gimbal/camera so that the unwanted items are not in the display. One caveat to that is that the landing gear may become visible. Another possible issue is that the longer the throw between the camera and the body of the bird, the bigger effect it will have with the overall balance as well as vibrations.
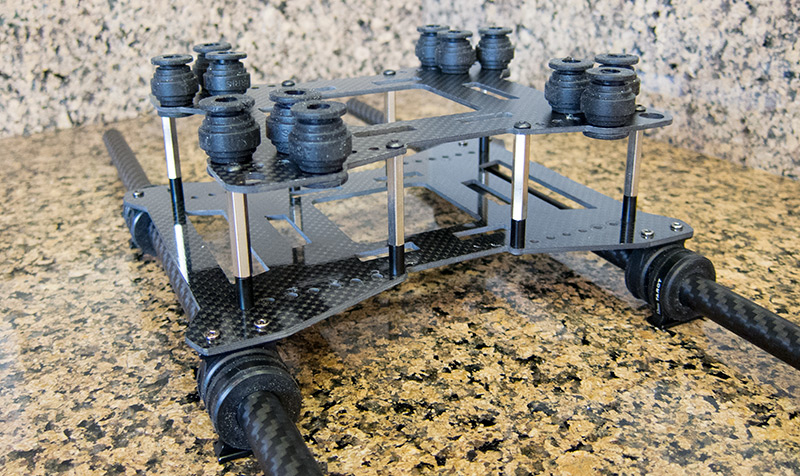
The first test today will be this setup (above and below pictures), adding about 1.25 inches of extension.
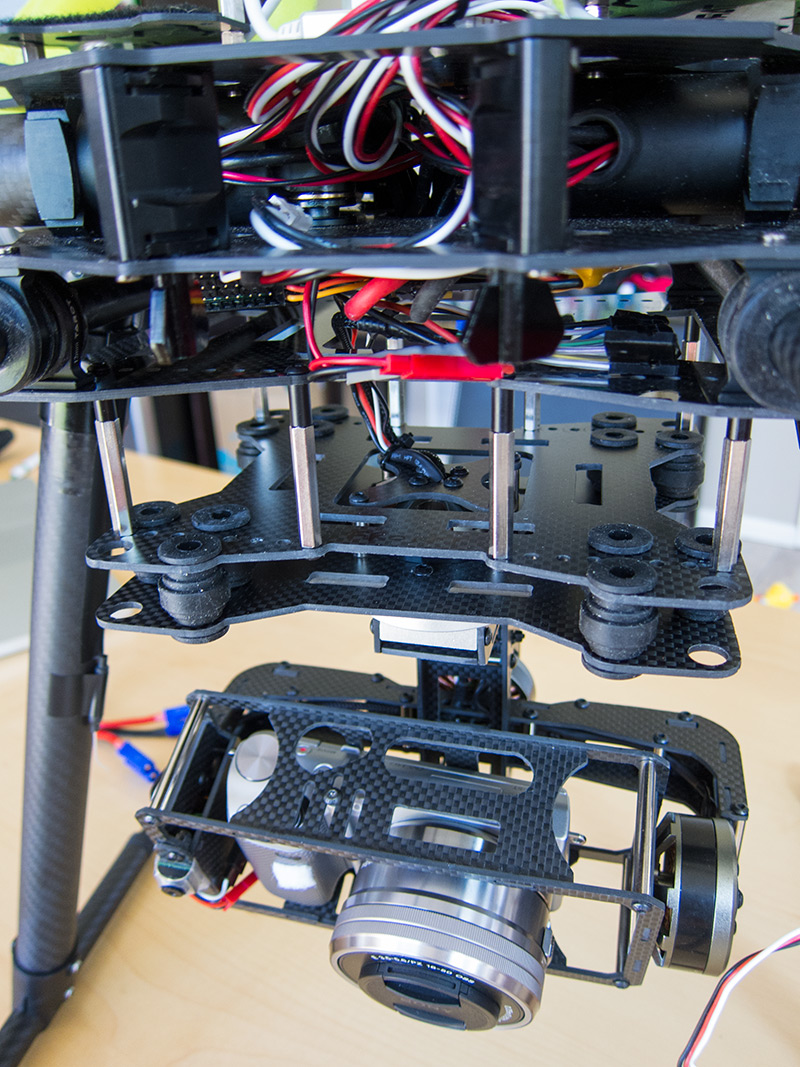
I’ll check for props/arms/landing gear in the video as well as video clarity. I’ll also check the vibration in the SuperX flight controller logs. Also should note how it flies, as the center of gravity of the copter will be affected.
A report will follow.
I’m ready to post a video now of some low light flight testing. I recalibrated the gimbal in order to fix the issue where it would roll a few degrees one way and make the video look like the original Batman movie from 1967. It would appear that issue is fixed.
The video settings on the camera are all AUTO, except for the focus which is manual/infinity. The results are quite remarkable in low light. The Sony NEX beats the living hell out of a GoPro in low light.
Following the last post I had to take the hexacopter offline and tear it apart in the shop. Fortunately I found a way to take the one loose arm off and fix it, without having to tear apart the entire bird. That would have been a real pain.
When reassembling, I used some slightly different and thicker double sided tape for the SuperX flight controller. I also was able to clean up some of the wiring.
The first test flight (video highlights below) was quite amazing. First I was amazed that the thing even flew. In fairly strong winds it flew very well.
The video above is nearly flawless. I’ve been working toward this for so long. I’m thrilled to be at this point in the development of this platform.
Upon examining my flight logs I found that the vibrations this time were the absolute best and lowest I’ve ever achieved. Perhaps the arm was loosening causing some of the old vibrations or perhaps the thicker and spongier tape holding the flight controller on made the difference? Perhaps both.
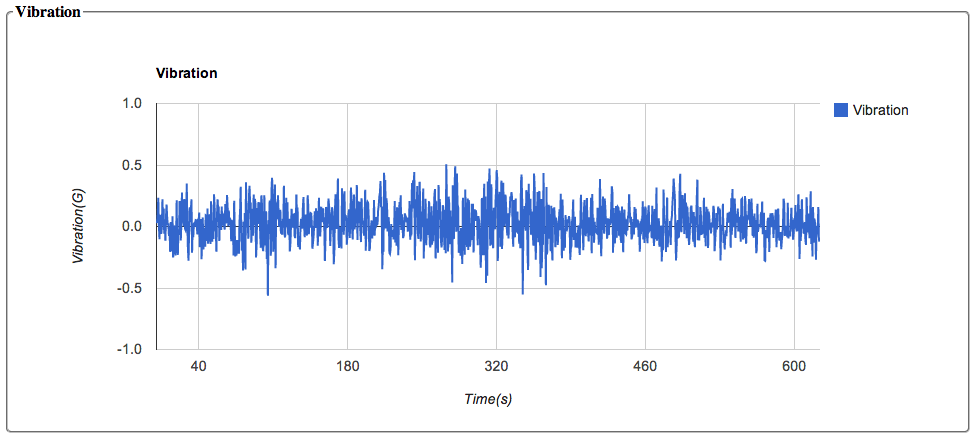
Whatever the reason, the results are fantastic. All I need to work on now with the build is lowering the gimbal a bit to get the props and arms out of the camera frame.
One other slightly irritating thing I fixed was the landing gear. One leg was slipping/rotating like arm #5. That’s all fixed too. Once again, another possible small source of vibration.
Hope to get more batteries and and FPV system soon.