Drone and UAV Technology Reviews, Articles, News, Build Logs
I’m glad to report that my new 2 inch FPV quadcopter is now airborne. I had a successful maiden flight, line of sight in the backyard. I even did some trimming of the grass (video below).
I took the quad to a local park last night and flew about 10 packs around, over, and even under a few trees. That marked my first attempts at any kind of moves “under trees.” I did crash a couple of times, but one bent prop was all the damage.
I did find that the RunCam micro camera isn’t that great in dark conditions.
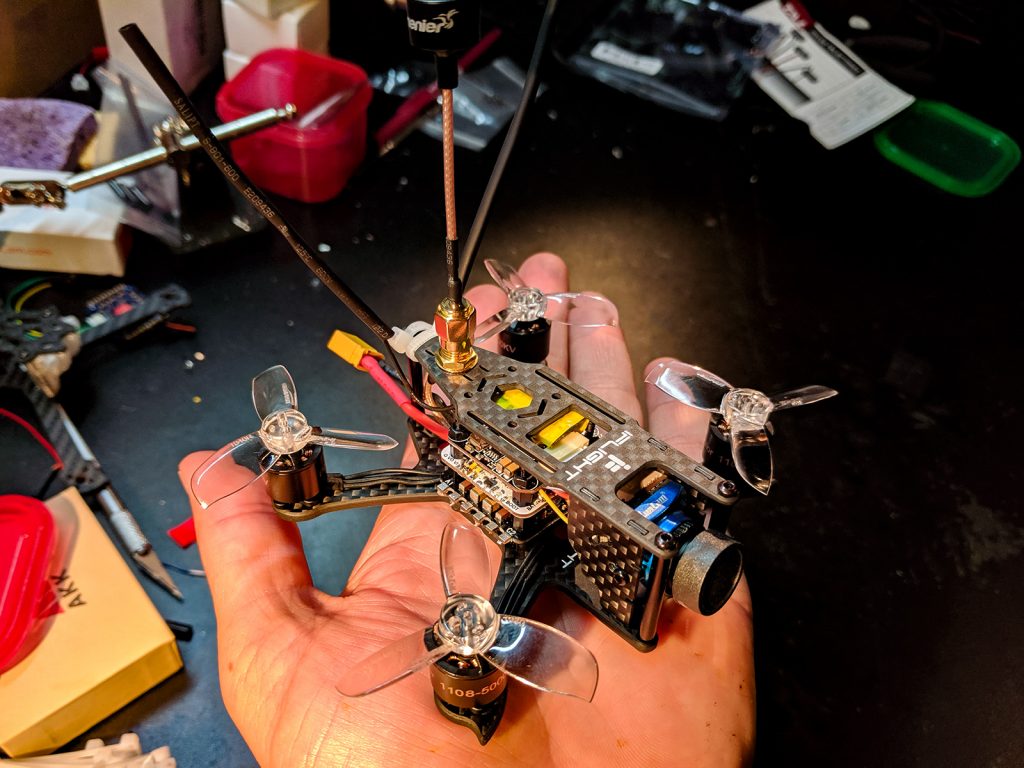
My last true build was back in 2015. After a long break from building, flying, and crashing, I’m back at it. I’m going down the FPV racing road and having a blast flying FPV. Having built a giant hexacopter in the past, I’m now building the exact opposite, a tiny tiny micro quadcopter with two inch props.
Frame
I found this iFlight iX2 frame on Amazon for $16.99. It’s a 100mm frame built for two inch props and a micro FPV camera.


Electronics
Assembly
I haven’t done much soldering over the last few years, so it was a little tough to start back up on this build. The electronics are all 20×20 mounts. They’re very, very small. So soldering wires to the pads on the flight controller was challenging.
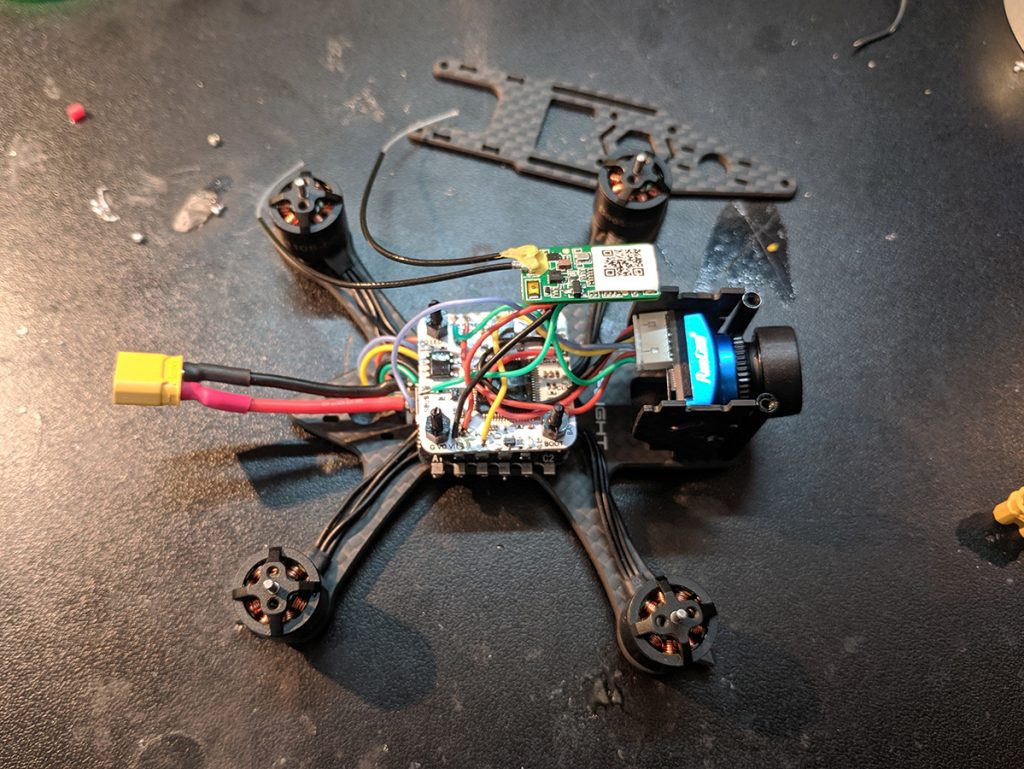
I got the entire electronics stacked in the middle, but I’m probably going to need to rotate the FC 90 degrees to make it easier to access the USB port for configuration.
During assembly, when I’ve got the bird powered, the RunCam gets quite hot. Not sure that’s normal or not.
I’ve got the receiver bound to my transmitter and I can arm the props. I’m waiting on proper sized/powered batteries to fly it. I strapped a 3S 450 on it but it was waaaaay too big. I tried to liftoff with it but instead the props flew off and landed on my neighbor’s roof!
Maiden Soon
I hope to do a true maiden flight in the next couple of days. Stay tuned.
I’ve been away from building/flying for quite awhile. Many factors were involved in my time away from flying, mostly “life” things like kids, moving, changing jobs and so forth. But I’m back in a space with all that where I can dedicate some time to flying and building again. So the first task is to try and get all of my existing drones working again.

I had to do some wiring maintenance before I was willing to try and fly this large, 960 hexacopter. In storage some of the wiring had come loose. So it took me a couple of days of finding old tools, solder, flux and the rest to make the fix. I finished that work off yesterday and did some final props-off checking. I also had to remember how to work my Taranis X9D remote!
I was nervous and had forgotten that the left aileron didn’t snap into a default position, so the altitude of the craft is always touchy, a.k.a. responsive.
I didn’t fly with the gimbal and expensive camera equipment on it yet, just in case. The flight was successful. I did a smooth landing and one more takeoff, hover and landing. I see that some of the LEDs are burned out and I’ve planned to replace those anyway.
I’m back in the air!