Drone and UAV Technology Reviews, Articles, News, Build Logs
I have a pile of lipo batteries that have gone bad and haven’t been able to dispose of them properly. Most have a bad cell or two so they’re dangerous to throw away or destroy. I needed a solution to discharge the lipos completely and found a cool article by Oscar Liang for a do-it-yourself discharger. I followed his spec, except I only made a 12 volt version instead of his version with a jumper to switch from 12 to 24 volts. I have a cool little discharger (3rd image) for bringing batteries to storage voltage so any lipos I have that are over 12 volts I set them to 3s and let the discharger bring them down to the 12 volt range. Then I slap the battery on my discharger and it will kill them quite fast. After a few hours, or even overnight, the voltage on even a 6 cell is only around .01-.04 volts. At that point I can just short the positive and negative wires together and finish it off. Then I clip the plugs off and save them for other uses and the batteries are ready to be disposed of.
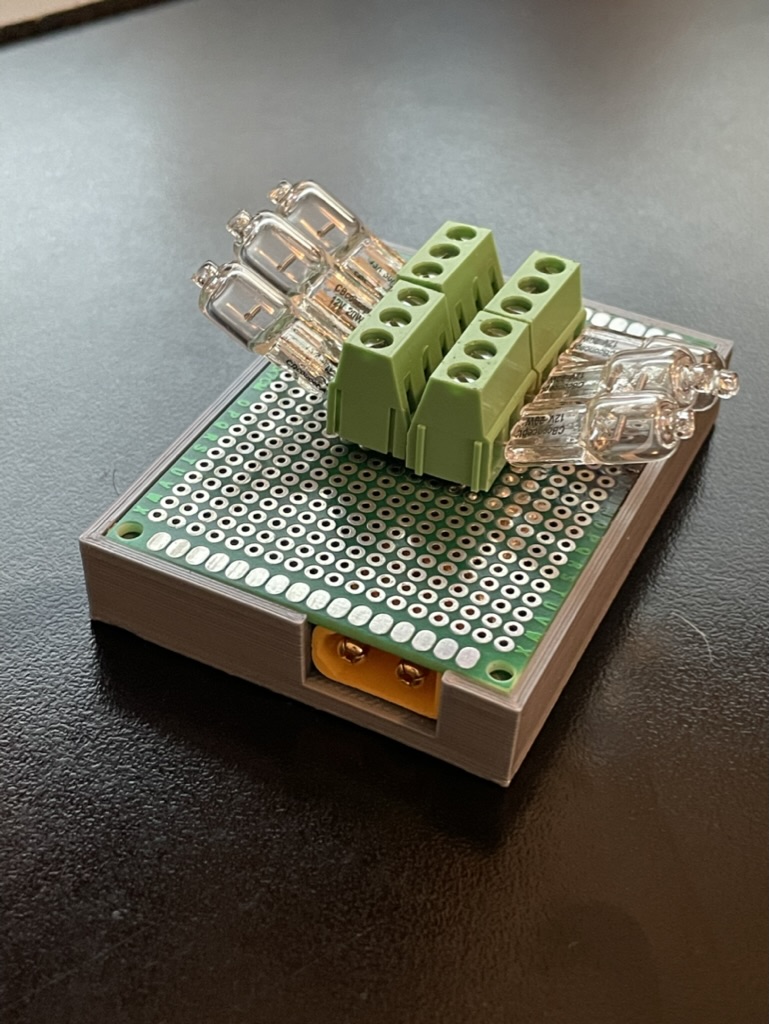
Being the geek that I am, I designed and 3D printed a little case to make it nice. Here’s the final product.
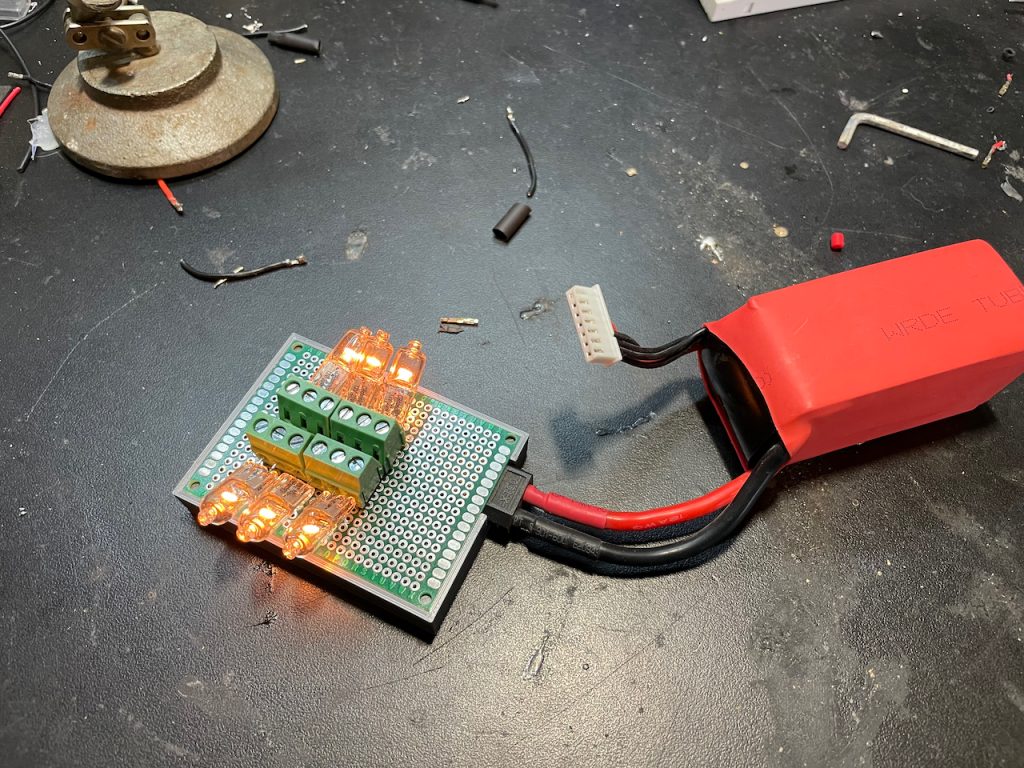
And here it is in action. The lights start out quite bright and hot if the battery is up at 12 volts, but after a few seconds they dim as in the photo below.
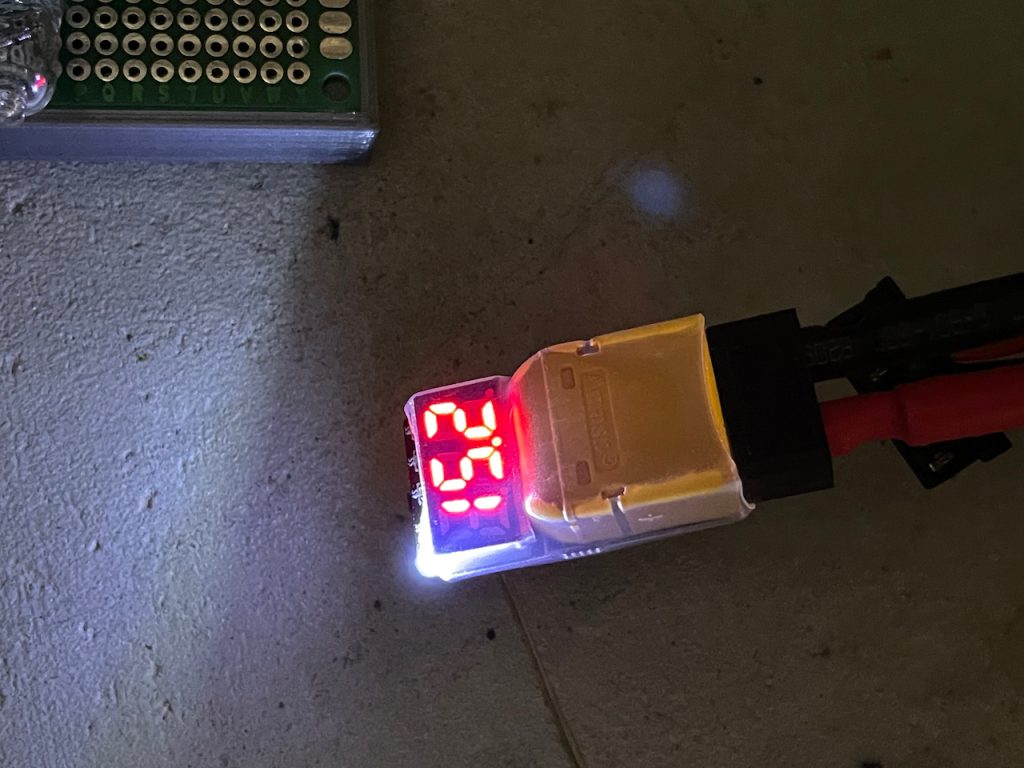
And below is the discharger which I bought at Pyrodrone for around 6 bucks. It has a little button to switch the values to 2s, 3s, 4s, 5s, 6s. The battery I’m discharging is a 22 volt 6S which I’ve got down to 15.2 volts.
Flew the Cinesplore cinewhoop outside for the first time today. Sure flies different than a 5″ freestyle quad. It was “listing” to one side. Probably need to recalibrate the gyro.

Also didn’t have any BF OSD stuff working in the DJI goggles. Need to check the BF setup. The video from the GoPro looked good, way better than the goggles. The antenna is way too short. Barely above the battery. It reduces the range. Need the longer antenna to get it higher above the battery.
I’m jumping on the cinewhoop bandwagon in hopes of capturing some nice, slower motion, cinematic GoPro video. After a lot of research I chose the Cinesplore frame. Below are some pictures of the frame. I’m waiting for parts to come in to continue the build.


