Drone and UAV Technology Reviews, Articles, News, Build Logs
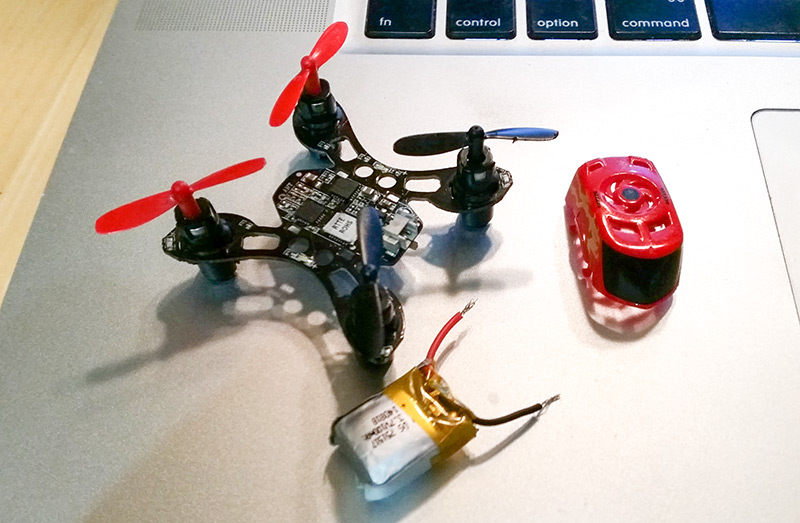
A couple of nights ago my doorbell rang. It was after dark and I wasn’t expecting anyone. Before I could get five feet closer to the door the doorbell rang again. Someone was in a rush. When I opened the door it was two neighborhood kids, one about 8 years old and the other perhaps 6. He had one of those tiny mini-quads which, as you can see below, had some battery connectivity issues.
“Can you fix it mister?”
“Can you fix it mister?” the kid asked… I told him I could probably fix it, but it would take me a couple of days because I was busy. So he left his quad and went home.
After dinner I decided to to my best Scotty from Star Trek and fix the thing in a fraction of 1/1000th of the estimated time. “I can’t fix the warp engines for 2 days, but I can get you warp speed in 2 minutes.”
I looked closely at the circuit board and could see markings for + and – battery connections. I re-stripped the leads, soldered them on, and the bird powered up perfectly. The kid was blown away when I rang his doorbell some 30 minutes after he rang mine. He was thrilled to have his bird up and running again. His parents asked me if I would mind “teaching” him some stuff about drones.
Sounds fun.
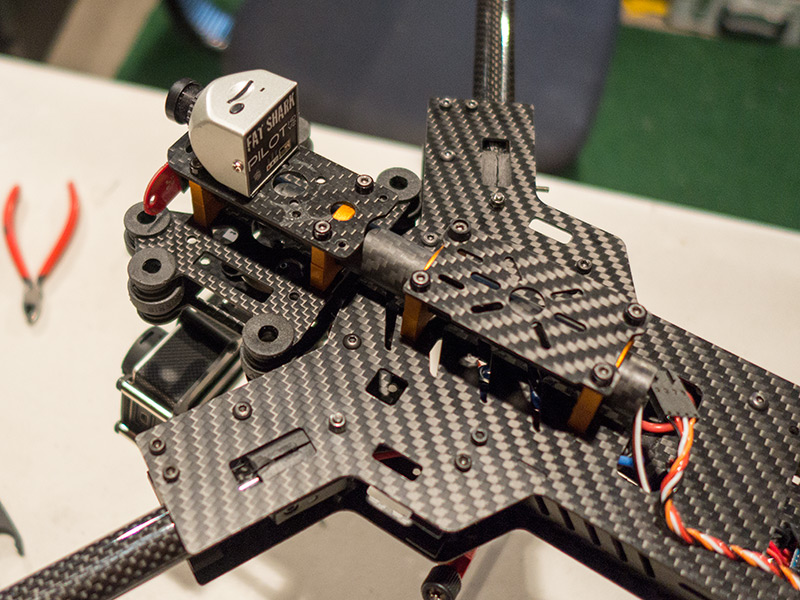
I’ve been fairly satisfied with my second frame for my Alien 680mm Quadcopter. The “Alien” frame is a foldable design, meant to be more portable and easy to transport. Unhappy with the first frame I purchased, I picked up a second one and transferred all the parts. It has been much improved.
Part of the catch with my new frame is the foldable arm mounts were weak. I ran into some issues trying to level my motors and noticed that the arms were not level with each other, and were actually sagging. There was some play in the arms, vertically and horizontally. Imagine how messed up that could be in flight with arms moving up and down and the flight controller trying to compensate. And over time that play in the arms would certainly end up in an arm failing.
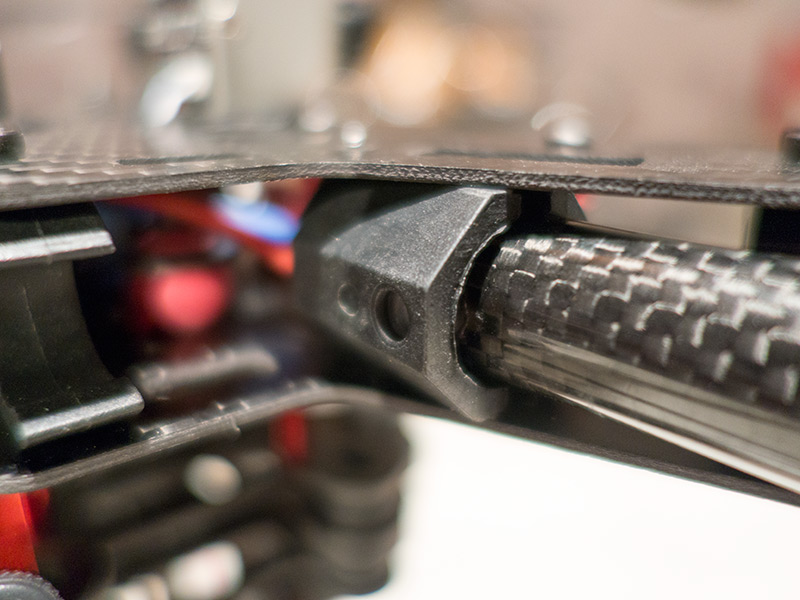
Notice how much play there is around this clamp? Bad bad bad.
I took a look at the old mounts which came on my first frame, and those happened to be more solid, by a long shot. So I ripped apart the bird and replaced the weak arm mounts with the more solid ones from the old frame. The difference is remarkable. My bird is much more stable and the video quality is better. I will have to mod the folding clamps a tiny bit but that’s not a big deal.
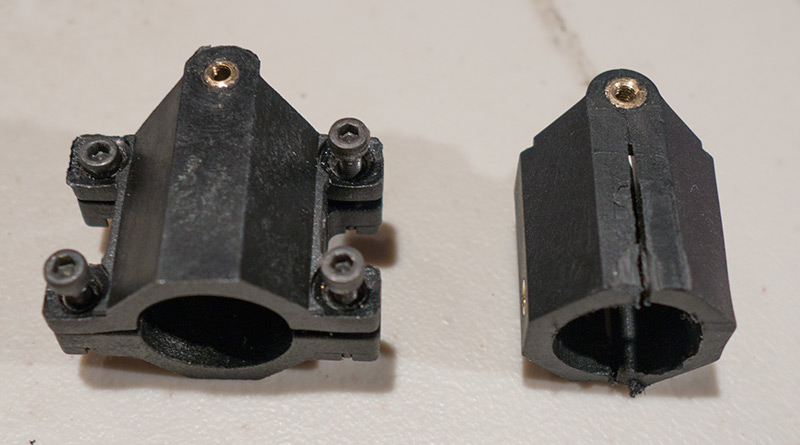
Left: the better 16mm arm mount
Right: The weak one which was removed
It’s nice to have an entire extra frame of parts to pick from when building or tweaking a build of a multirotor copter.
Strange behavior in my Alien last night. Finally tried a test flight of the new setup with my gimbal mount forward and battery back a tiny bit. This is to attempt to get the props out of the video/photo frame.
On take off my bird would not yaw clockwise, only counter. And it would not hold position. Luckily I was able to land it without doing any damage as I had minimal control. I recalibrated the GPS/compass but still issues. A look at my motor outputs (photo below) shows the clockwise motors are at a much lower output than the other two.
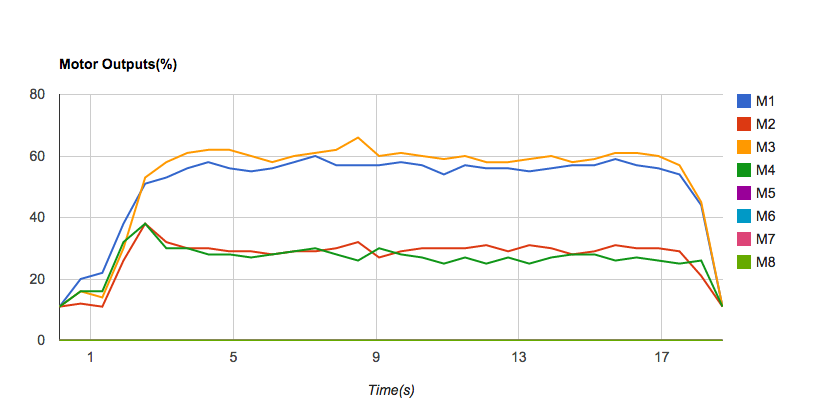
Because of this event I decided to upgrade the firmware on the MiniX flight controller and will probably go through all the stick calibrations again. More testing soon.