Drone and UAV Technology Reviews, Articles, News, Build Logs
I’ve now started a new build, the new Arris X-Speed 250 racing quadcopter which was kindly provided for review here by myrcmodel.com. The basic frame is put together as seen below.
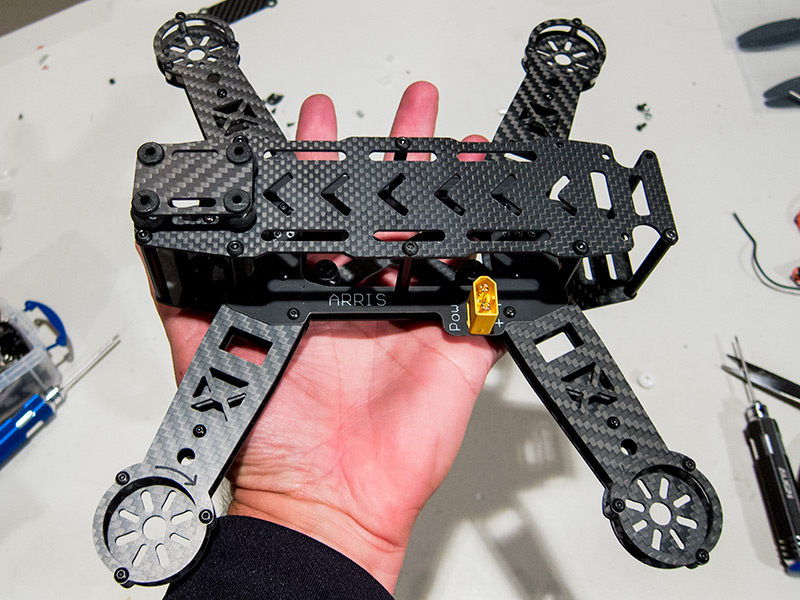
Arris X-Speed 250 Quadcopter Frame
I shot a five minute video of the unboxing and examination of the parts for the basic unassembled kit below.
This is one of the better, and more dangerous drone saves I’ve seen in a while. The waves and rocks where this guy ends up are pretty risky. But when you have that much dough put into a UAV, you don’t think about that.
Reader Pat’s question and answer continues. The two previous questions were related to drone lighting and the electric retractable landing gear.
How do you calibrate your motors, or did you mean that you’re throttle calibrating your ESCs?
I must have written somewhere that I had “calibrated the motors” on my large 960mm hexacopter. Pat’s terminology is better. I mostly likely was referring to throttle calibration of the ESCs. The process of throttle calibrating my ESCs was a pain. As it turned out there was a funky issue between my particular ESC model (Hobby-Wing Pro 40A) and my transmitter, a Taranis XD9.

Tarot 5008/340kv Motor
Typically a throttle calibration would be something like this. Power up the ESC with the throttle at maximum. After the ESC beeps, reduce throttle to minimum. It should only take a few seconds. But the above mentioned issue caused many of my ESCs to randomly not arm. It would seem that the distance of the throw was not enough, or that the throttle stick wasn’t going all the way down to -100. I fixed the throttle stick later but that’s not how I resolved the calibration issue.
After much reading I found that if I set my throttle distances from -89 to +100 and then did the calibration it worked. I would then set the throttle back to -100 to +100 after they were all calibrated. Then all motors would arm.
Regarding the Tarnanis not going all the way down to -100, the throttle stick would go down but would not stay at -100. It would stay somewhere around -95. That would mean arming problems as well, plus I would get the Taranis “throttle warning” and would have to move the sticks to be able to do anything. I had to take apart the Taranis and tweak the throttle screws until it went all the way down. Then of course my center point calibration with my flight controller went wonky. So I ended up doing all stick related calibrations for the Taranis and Taranis/SuperX controller over again.