Drone and UAV Technology Reviews, Articles, News, Build Logs
I just finished building a GepRC GEP-CX3 Pro recently. I haven’t built a 3″ for awhile and was itching to add another fun but small ripper to the fleet. This one I decided to put in a Caddx Vista Nebula as I have no desire to add anything analog to the fleet except for larger long range FPV quads.
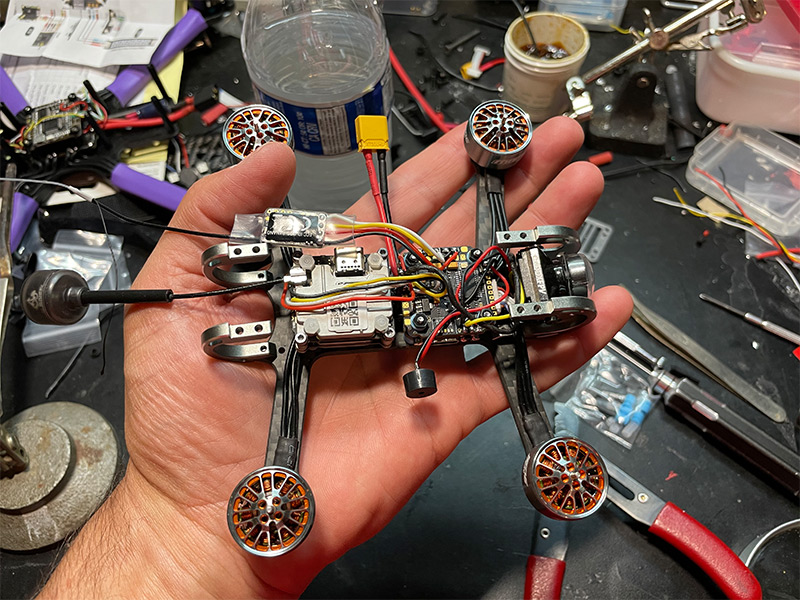
The frame is an H style, so there are no props in the view of the camera. The rounded front and back make the body look like a Hebrew National, so I’ve named this on “The Hebrew National Quad.”

There was not much space for both 20×20 stacks to fit. One stack was the Vista Air Unit and the other a Mamba F405 mini stack. Wiring sticking out from either stack meant issues, but I did fit it in.

Parts List

The build went fine and the maiden flight was successful. The only issue I’ve had is the motors are hot and the battery life is not as high as I’d like. I’ve been in Betaflight messing with the gains and may have to also adjust the flight controller dampening.
I’m thrilled to announce an addition to the drone fleet, the Autel Evo 2 Pro. Finally technology has advanced enough for me to find a small, foldable drone to replace my huge hexacopter. This is a bird I’ll be using for shooting RAW images and high quality 4K and even 6K video.

I debated with myself between the DJI Mavic 2 Pro and the Autel Evo 2 Pro and a few features pushed me to Autel side. I’ve been flying this bird regularly for about two months now, and I’m thrilled with the quality of the photos and video it produces.

The range of this drone is impressive. The flight time I’m getting crushes my hexacopter, 6x over. But it doesn’t get the 40 minutes of flight time that’s advertised by Autel. It’s more like 30 minutes or upper 20’s.

There are still some kinks and bugs to work out for Autel and the Evo 2 Pro model. After the last firmware update I’m getting some yaw drift. I’m also getting occasional situations where it seems the collision avoidance system (oh, forgot to mention that) “thinks” there are objects nearby and the bird stops and hovers.
I think this may have been my first build which I started and completed, and successfully maidened in one day. I’ve wanted to have a DJI HD FPV based quad that was smaller than the two 6S 5″ quads I currently have. Something more portable, and able to fly in smaller areas.
iFlight DC3 HD Frame
The frame is the iFlight DC3 HD. DC stands for “deadcat,” which is an arm design which results in the camera having no props in view.
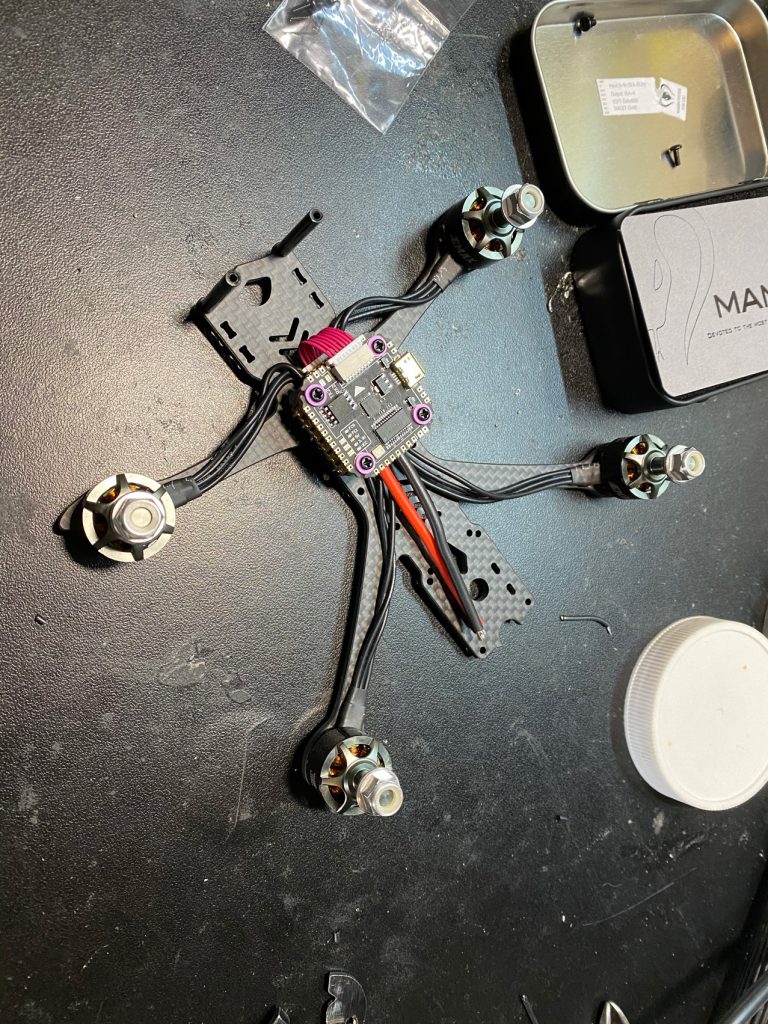
Deadcat designs are what many cinematographers choose.
FPV
I’m hooked on DJI’s FPV system because of numerous reasons, including the clarity of the FPV view in the goggles, recording HD 4K video on board, and elegant interfacing. So that’s why I chose the system for this build.
Receiver
For my receiver I’m using TBS Crossfire. I’ve seen the light with TBS Crossfire and its long range capabilities. I’ve essentially vowed that from now on I will be using Crossfire for all my builds. This small quad has Crossfire, as well as the Immortal T antenna.
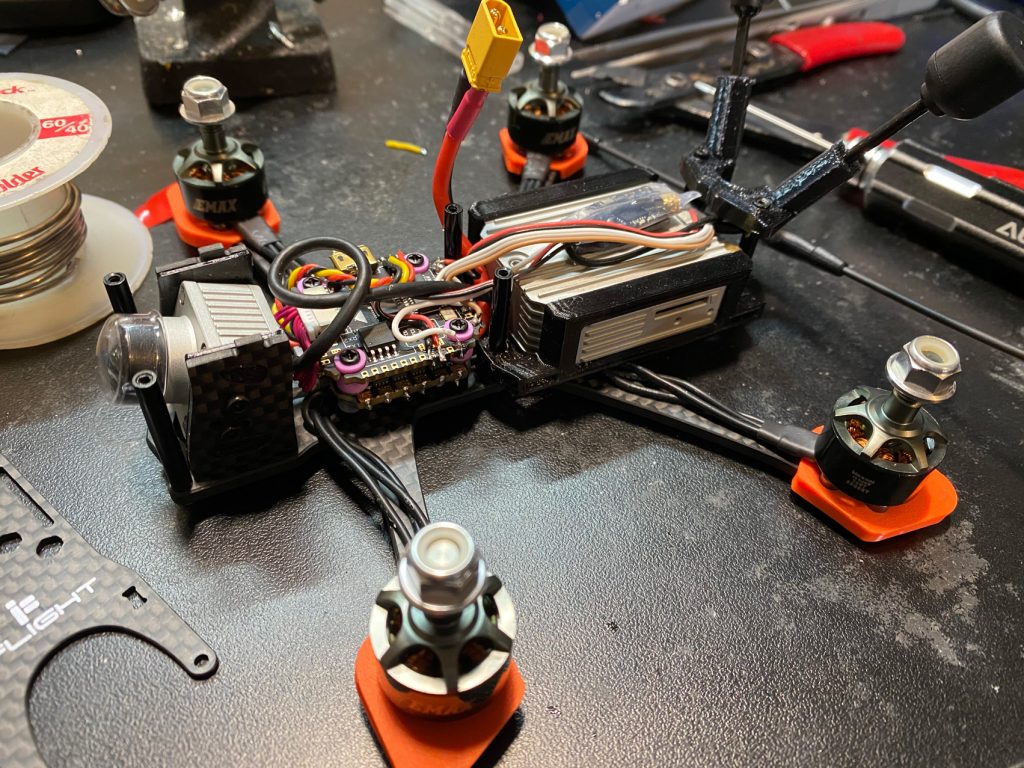
Motors/Power
I’ve been testing out some EMax motors recently. I decided to go with the Emax ECO Micro Series 1407 motors at 2800kv. Based on that one might guess that I decided to run the system on 4S battery power.

Currently my battery of choice is a CNHL 4S 650MAH.
Stack
For the flight controller and 4in1 ESC I went with the Diatone Mamba Stack F405US MK3 Mini F35. I have a couple of other Mamba ESC’s in quads and I’ve been satisfied with their performance. The stack is capable of running 6S.
3D Printing
I found some arm bumpers/motor soft mounts online to 3D print. I also designed a 3D printed set of mounts for the Crossfire Immortal T.

I went with orange TPU filament to go with the orange theme of the quad.
Flying
I’m about to do some real flying with the quad in the next few days and will post some performance comments, and flying videos soon. Overall I’m very happy with the build and the equipment choices.