Drone and UAV Technology Reviews, Articles, News, Build Logs
I always have to be building or tweaking something in the drone world it would seem. It’s like an addiction really. Unsatisfied with GoPro images, I’m hoping to get my old Canon S95 or my new Sony RX100 camera mounted on a gimbal on my 680mm Alien quadcopter.

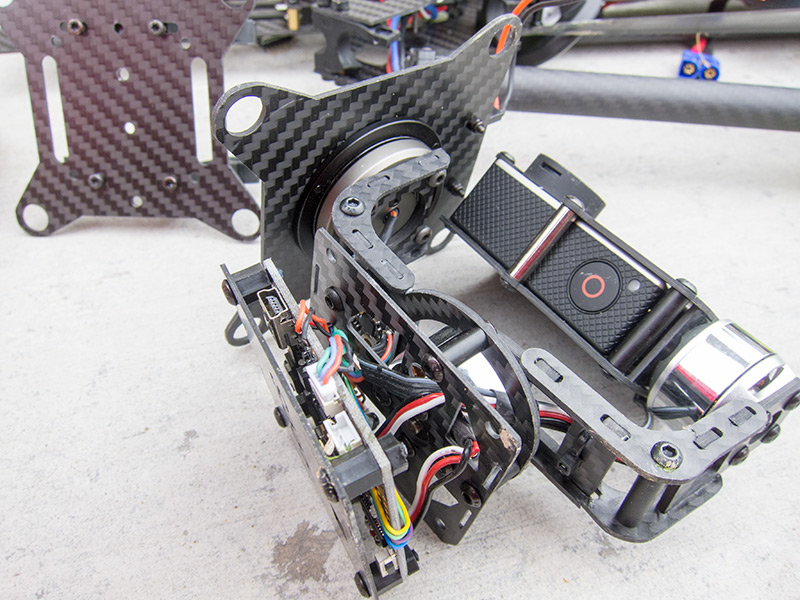
3-Axis Gimbal
After a lot of research I decided to pick up this “DYS” 3-axis gimbal pictured above, on Amazon. The main parts are milled aluminum and I like the way they can be easily tweaked for balancing various cameras without even needing a tool. This gimbal will hold a NEX camera as well, which is the one I use on my large hexacopter. This gimbal could save a lot of weight as compared to the very nice, but overbuilt Arris Zhaoyun 3-axis gimbal I’m currently using.
Part of the reason this setup above is inexpensive is it is not assembled. Versions may come in 2-axis or 3-axis, and often times the controller board is not included. I have a SimpleBGC 32bit controller ready to go for this unit. I’m almost ready to start mounting that part, then will come the PID tuning.
I’m going to be on vacation for a few days, so this project will probably be on hold for a week or so, but looking forward to getting this rocking on a foldable bird I can take to remote locations.
Here’s where I bought the DYS 3-Axis Gimbal.
I’ve just completed the repair of my now formerly broken Arris CM3000 Pro 3-axis gimbal. The CM3000 Pro is a 32 bit 3-axis gimbal for GoPro cameras.
There were a few broken pieces which were not that easy to replace due to the wiring for the pitch motor and the pitch sensor. There’s some carbon fiber framing in the shape of an “L” which goes from the pitch motor to the roll motor. Both sides of that framing were broken. I ordered CM3000 replacement parts from Hobby-Wing, but the whole L piece came as an assembly, glued together. Otherwise I would have just replaced the sides which were broken.
The broken gimbal:
Broken Gimbal
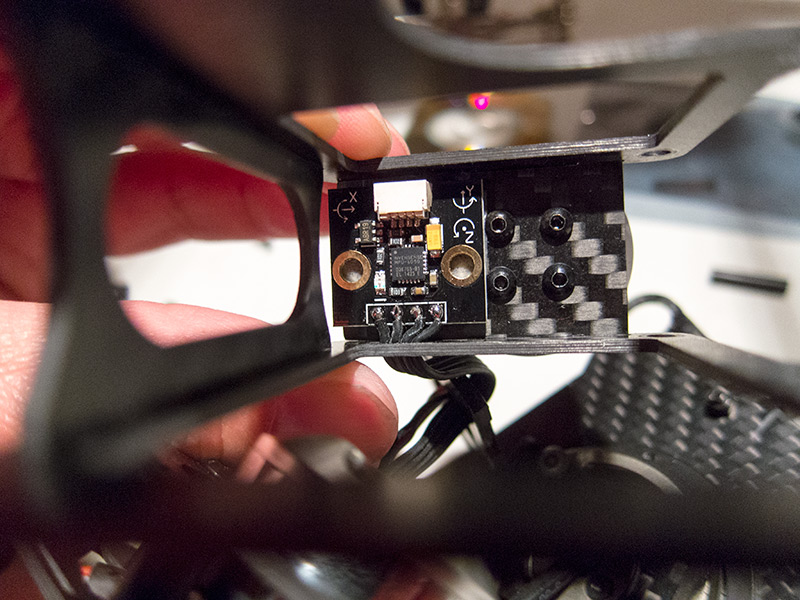
I had to unsolder the four tiny connections to the sensor located under the camera:
Then had to unsolder the three connections on the main board for the pitch sensor in order to unthread the wires from the old broken L arm.
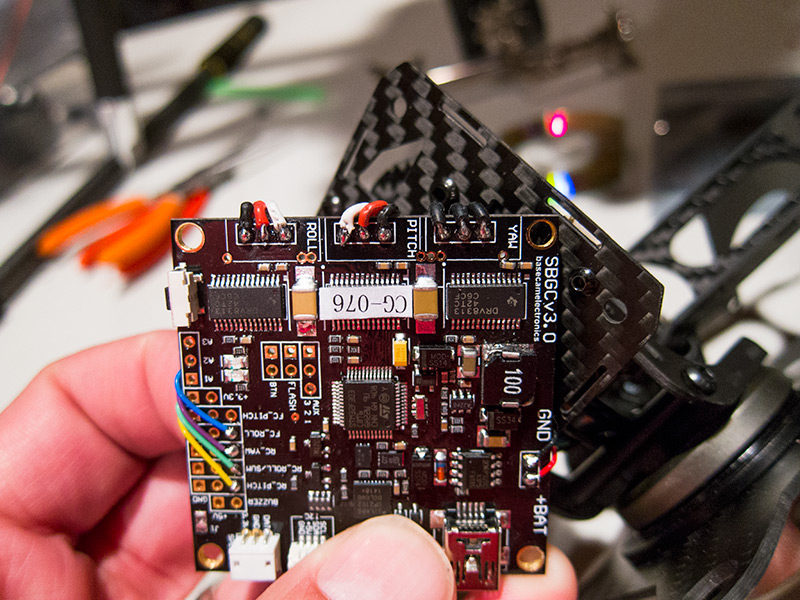
Also, all the plastic screws which held the protective box for the SimpleBGC gimbal controller were broken, so had to replace those.
Repair complete. Still need to test out the gimbal and make sure it works.
Then it is on to rebuilding the Alien H4 680 quadcopter.
Winter is in full force here with plenty of snow and very cold temperatures. I’ve been working on fine tuning the settings for my large hexacopter (six propeller drone) this year, and when the snow and cold hit I saw that as an opportunity to capture some “winter” themed video and photos for my demo reel. The cold temperatures threw all sorts of monkey wrenches into that idea.

Cold Temperatures Change Drone Flight Characteristics
How Cold Temperatures Affect Drones
Drones are highly technical machines with motors, sensors, tight tolerances. The cold temperatures can affect the sensors such as the gyroscope and accelerometers, causing them to misbehave or produce unexpected results. This can affect the flight characteristics of the bird.
Camera gimbals, which are used to keep cameras level or smooth out motion, also have these types of sensors. Cold temperatures can cause gimbals to perform differently than they would in warmer temperatures. One way to try and get around these issues is to calibrate the sensors in the same cold temperatures, not in the warmth of the shop.
Batteries can be greatly affected by the cold. There’s a reason why Sears advertised that their Die Hard car batteries performed in extreme winter conditions, because cold can reduce battery performance. Cold temperatures typically translate to shorter flight times. This is very important to keep in mind for those who time flights rather than keeping an eye on battery voltage. I’ve found that in very cold temperatures the voltage drops quickly at first, but does level out a bit toward the end of the flight.
Brittle parts can be a problem. If there are parts of the drone which need to be tightened before flight, doing so in the cold could result in easy breakage. For instance, the arms on my hexacopter are foldable. I make sure they’re tightened down in the warmth of my house and that I don’t tighten them down outside in the cold. Hard landings in the cold with more brittle parts could mean more damage to the bird in a crash.
Lastly, the pilot can be greatly affected by the cold. While flying yesterday in 12 degree fahrenheit temperatures, my bare fingers were numb about five minutes into the first battery set. Numb fingers can be a very bad thing when the feel of the controls on the remote is so important. With a numb thumb I could easily bump the throttle down and not feel that I’ve done so. A bad bump could mean reducing thrust enough that the bird falls from the sky, or perhaps a bump up in throttle might turn the bird into a kamikaze.
Air Density
Cold temperatures mean higher air density. This can change the flight characteristics of the drone. With higher air density the same propellor RPMs produces more lift. The motors will not have to work as hard, which could be a positive or a negative depending on the setup. Usually it is a positive though, producing slightly smoother flight and working the setup a little less.