Drone and UAV Technology Reviews, Articles, News, Build Logs
My last true build was back in 2015. After a long break from building, flying, and crashing, I’m back at it. I’m going down the FPV racing road and having a blast flying FPV. Having built a giant hexacopter in the past, I’m now building the exact opposite, a tiny tiny micro quadcopter with two inch props.
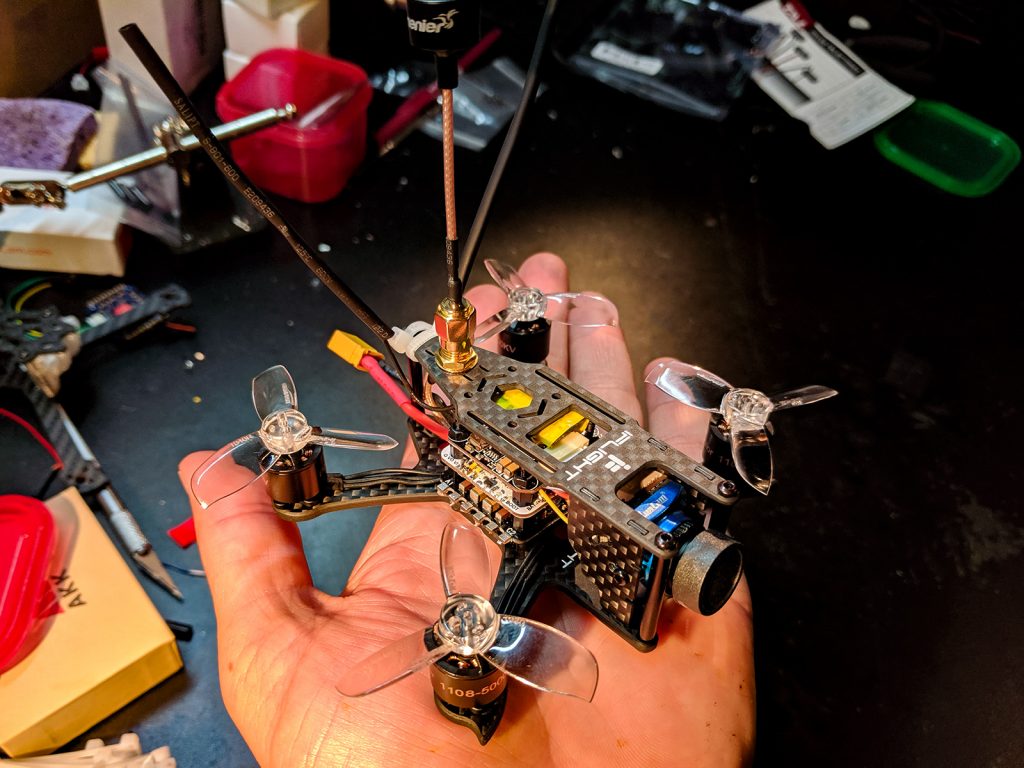
Frame
I found this iFlight iX2 frame on Amazon for $16.99. It’s a 100mm frame built for two inch props and a micro FPV camera.


Electronics
Assembly
I haven’t done much soldering over the last few years, so it was a little tough to start back up on this build. The electronics are all 20×20 mounts. They’re very, very small. So soldering wires to the pads on the flight controller was challenging.
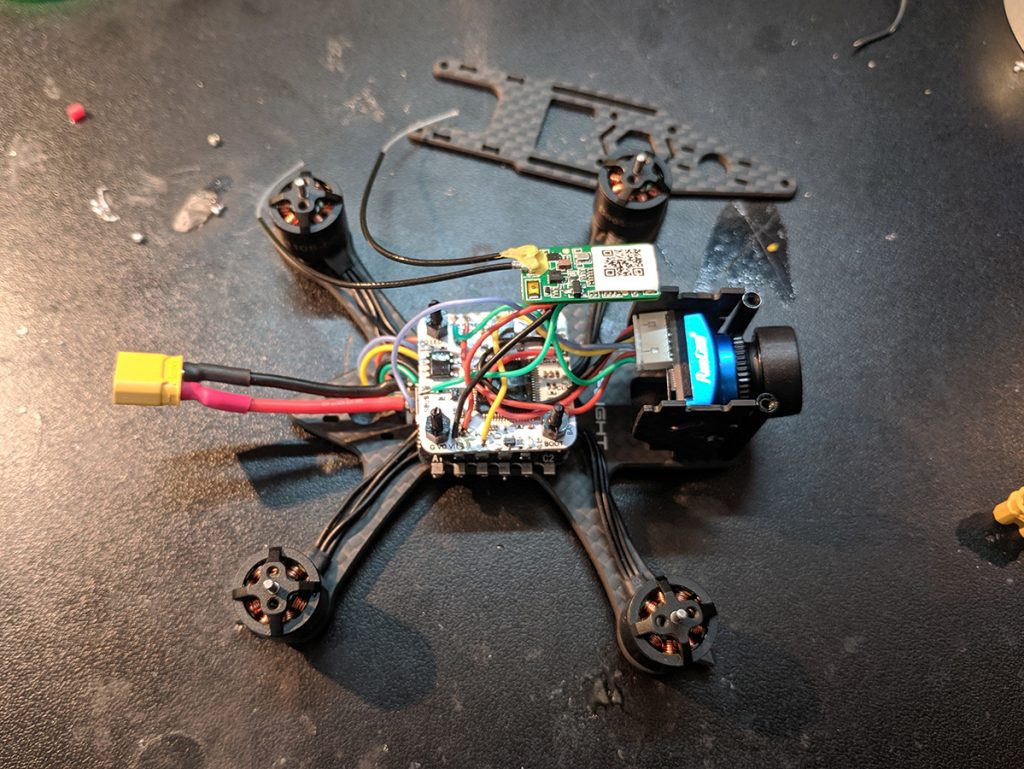
I got the entire electronics stacked in the middle, but I’m probably going to need to rotate the FC 90 degrees to make it easier to access the USB port for configuration.
During assembly, when I’ve got the bird powered, the RunCam gets quite hot. Not sure that’s normal or not.
I’ve got the receiver bound to my transmitter and I can arm the props. I’m waiting on proper sized/powered batteries to fly it. I strapped a 3S 450 on it but it was waaaaay too big. I tried to liftoff with it but instead the props flew off and landed on my neighbor’s roof!
Maiden Soon
I hope to do a true maiden flight in the next couple of days. Stay tuned.
A few times a week if it isn’t too windy I take my lunch break to a local park and fly my 250mm quadcopter racing drone for three batteries worth of flying. The parks are not terribly large but they’re forcing me to learn to fly, or deal with the consequences of crashing. Flying this type of drone is a departure for me, as my other birds are all slow-moving GPS based photo/video rigs. They’re about stability. This copter is about speed and agility.

This past weekend I dragged the wife and kid to a big park which has several soccer fields and two baseball fields side by side. There are some light poles too, which provide for some good obstacles to fly around. I found it to be an absolute blast to fly this speedy copter in a bigger open space. It’s SO fast that it needs a lot of space and I can do some crazy turns around the poles.

Speed flying at the soccer fields…
Thankfully the wife was able to capture some decent pics of the quadcopter in action. Unlike my bigger GPS birds this one needs 100% attention and I can’t let go of the controls to snap a picture.
This 250 quad is the Arris X-Speed 250 which I will be posting a full review of as soon. It is super fun to fly this compared to the big and slow moving GPS based photo ships I typically fly. This thing needs much more space and boy is it fast.
Speedy Quadzales #drone build update. Now have FPV (first person view) camera and transmitter installed. Also worked up a bug antenna style setup for the two receiver antennae. Testing tomorrow. This racer is the Arris X-Speed 250.