Drone and UAV Technology Reviews, Articles, News, Build Logs
Tough to fly here in northern Utah in the winter. It’s cold, windy, and of course there’s the snow thing.
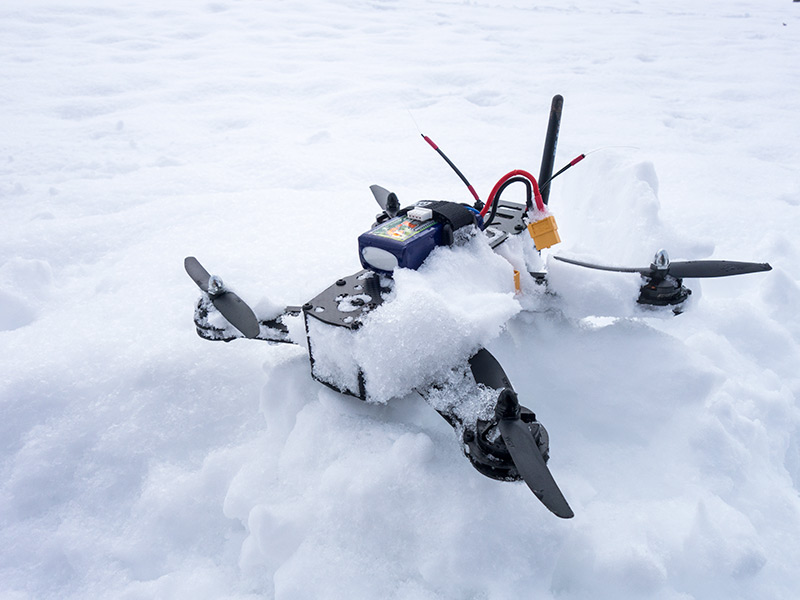
I took my Arris X-Speed 250 racer out today and got through one battery. On the second battery I was having some FPV interference and not able to see where I was going very well. I ended up losing altitude on a turn and then the FPV went “white.” I can see why now.

Before the crash. Happy face.



I’ve been semi-happily flying this new Alien H4 680mm quadcopter build. I say semi-happily because I’ve been in jello hell, trying to get rid of the video vibrations and wobbles. That, and the new landing gear I installed included one unit which was defective.
I spent a week (not 24/7 but you get the concept) balancing props and motors (motor balancing video coming soon) and reduced the overall vibrations quite a bit. I was out flying over a construction area, where there’s some open dirt and a few unoccupied homes being built. I was testing to see if I’d gotten rid of the GoPro jello effect.
That’s what I made a mistake that I was not aware of until it was too late. Suddenly the bird started to nosedive.
It crashed in some very soggy sod behind one of the new houses. One arm and prop was so impaled, it took almost all my strength to get the arm out of the ground. There was quite a bit of damage, though mostly small and inexpensive parts totaling up to about $120.00. The cost could have been far worse. The hours it will take to get it repaired, after waiting for parts from China, is the real pain.
The Mistake
Fortunately the MiniX flight controller keeps a log. That way I could look at it to see if any information could help me diagnose the cause of the crash. The log showed me some good news and bad news. The good news was that the crash was not due to any kind of equipment failure. The bad news was that it was user error.
I unknowingly had flipped into manual mode, thinking I had flipped to GPS mode. At 177 feet the props stopped spinning enough to keep the bird airborne. Seven pounds of carbon fiber, metal, and plastic hits the ground in about two seconds from that distance. No time to react.
I couldn’t believe the log and that I’d been such an idiot flipping to manual. A look at the switch on the remote confirmed MY error.
Solution
I never fly manual and I don’t intend to with this, or any of my copters. I don’t do trick flying. My ships are for aerial photos and video. I plan to either disable the manual switch (not the best idea in case of emergency when GPS fails or somesuch thing), or set my remote to delay 5-10 seconds and produce an audible “manual mode will activate in five seconds” type of thing.
Below are a few stills from the crash video.

Battery is UNDER the bird. This is not supposed to happen…

Battery ejected on impact. Velcro straps shaved off with razor precision. Gimbal vibration ball on left flying through the air. Long rectangular donut-shaped item is one of the gimbal control board box’s side panels, about .5 inches wide and 2 inches long. It must be right in front of the GoPro lens.

Top gimbal mount plate flying through the air…

Motor arm sure looks far away…

Fat Shark FPV camera flying through the air…

FPV camera left of tree points back. Too bad it was unplugged and not recording the view looking back toward the GoPro..

FPV cam still in air, motor wires from rear motor arm severed…

Battery still in air…

Quadcopter impaled in ground. Rear motor arm would soon break off.
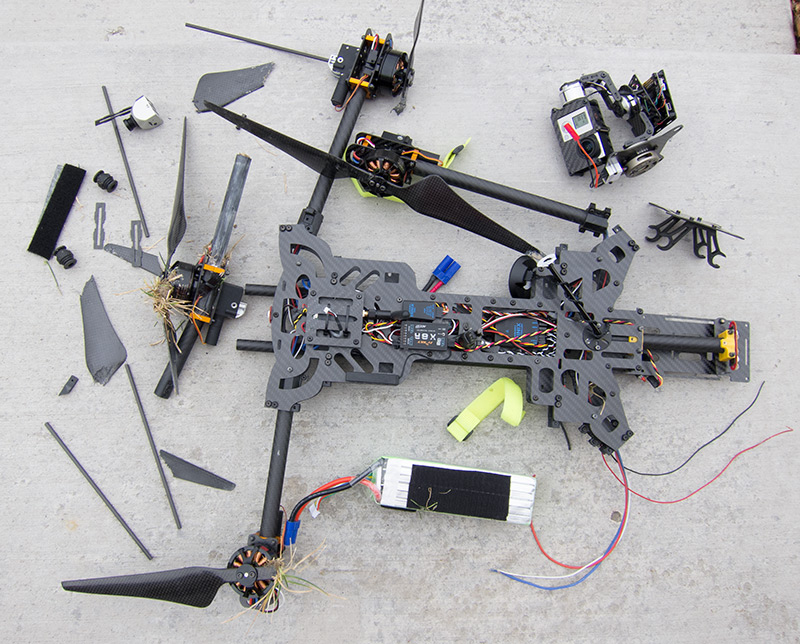
Assessing the damage…
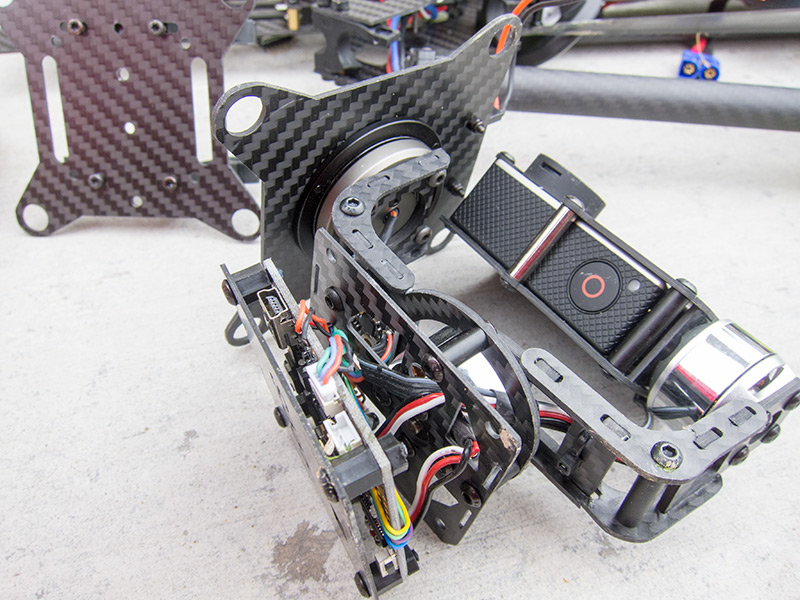
Broken Gimbal

Carbon Fiber props did some sod cutting
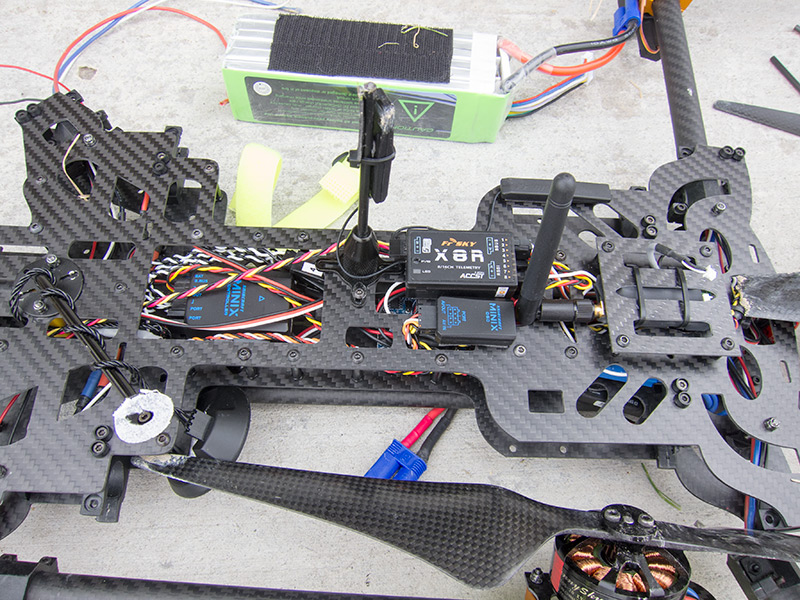
Core components and wiring survived. GPS tower toast.