Drone and UAV Technology Reviews, Articles, News, Build Logs
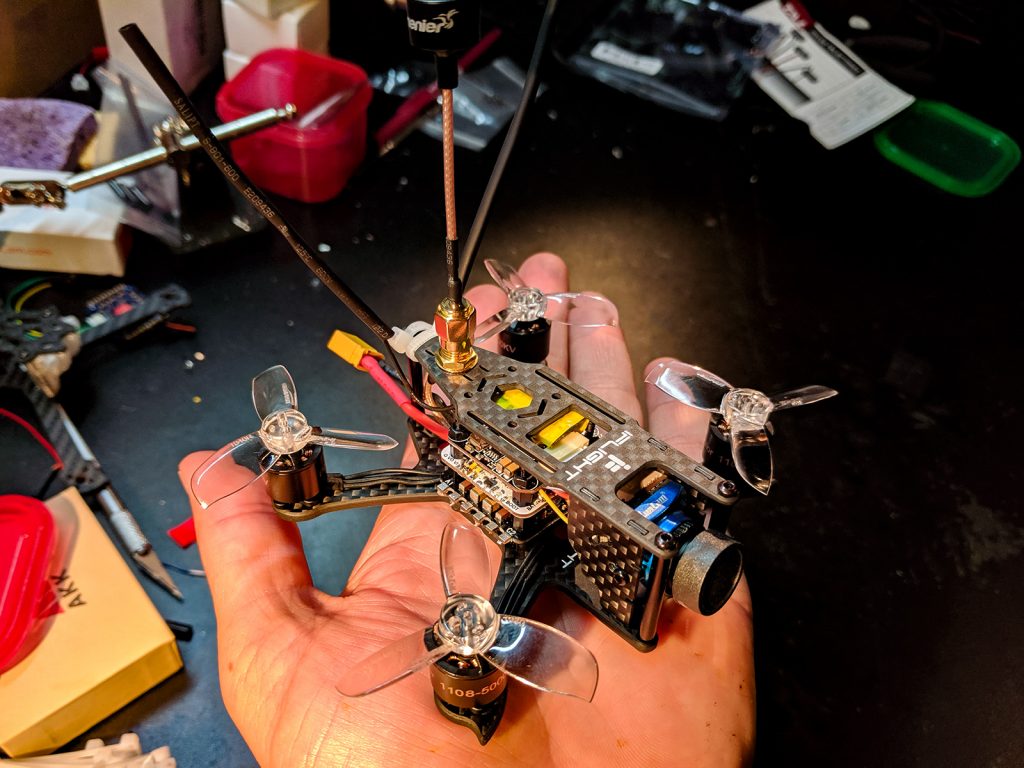
Momentous occasion. Got my first DJI HD rig flying, on 6S. It’s an iFlight DC50 frame, deadcat style. The image quality in the goggles is stunning. I was not able to get the DJI VTX antennas to mount in the included 3D printed mount without them popping out of the MMCX connectors. Super annoying. So just rigged up a temporary zip tie setup which won’t do well in a crash. Yes I know the T antenna in the front isn’t a great locale, but this build is so back heavy I was trying to put anything I could forward.

Just flew around the neighborhood so no real ripping. It feels heavy though, compared to my 6S Chameleon. Flies very smooth though. I plan to do a blog post about this and my DJI impressions soon.

Maiden Flight Video
Here’s the first flight test. Working!
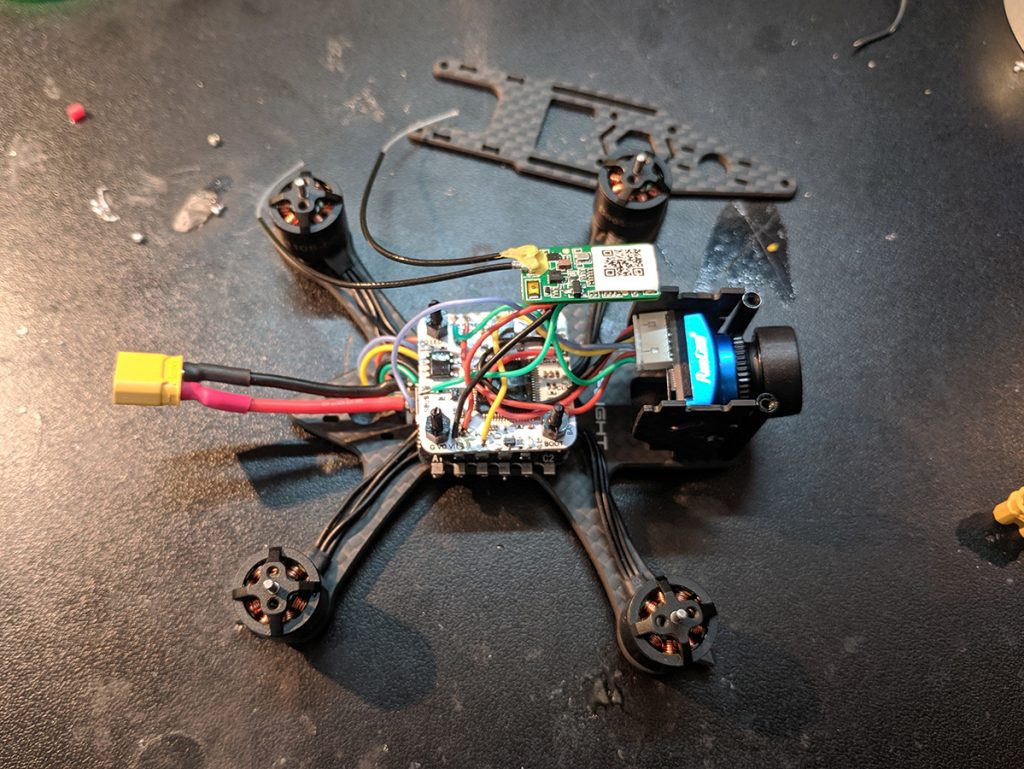
I just started up my 3rd build in three weeks. This one is the three inch Acrobrat HD Freestyle Quadcopter. I had “accidentally” bought some motors and decided to build a quad around them. Hehe.

This one will have a RunCam split camera. The Split is not only an FPV camera, but also captures 1080p/60fps HD. That camera along with the Acrobrat frame which has some nice vibration dampening makes for a quad that can produce some fantastic HD video without a GoPro. We shall see.
This build is about half way done. Should be launching it this weekend.
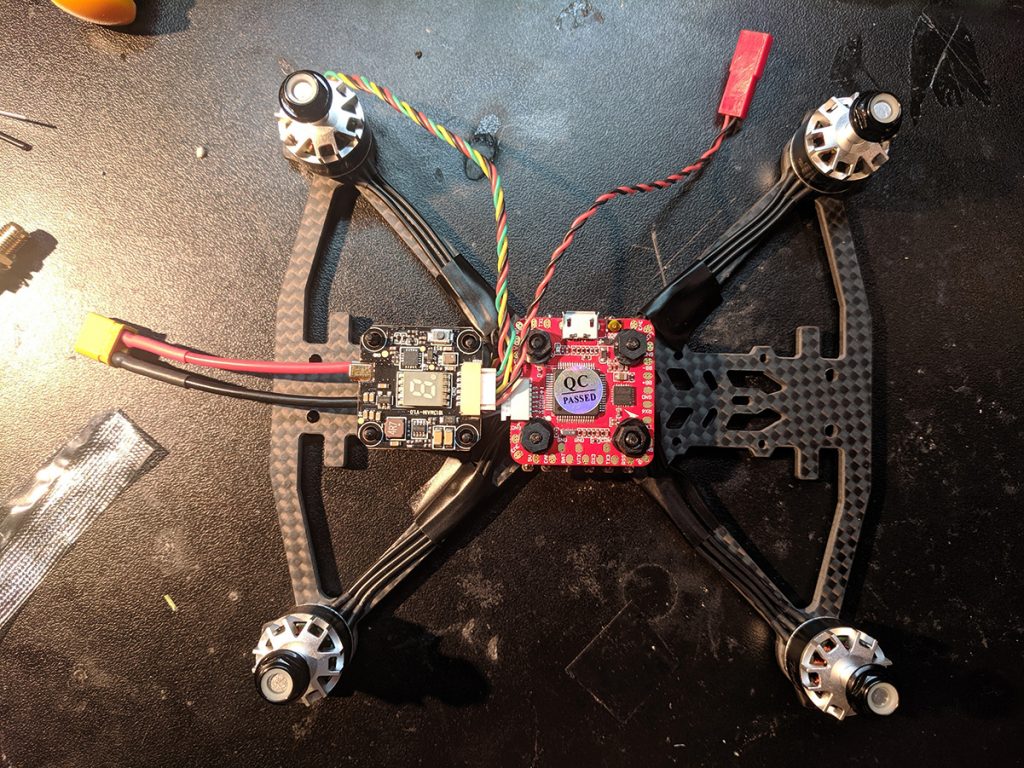
My last true build was back in 2015. After a long break from building, flying, and crashing, I’m back at it. I’m going down the FPV racing road and having a blast flying FPV. Having built a giant hexacopter in the past, I’m now building the exact opposite, a tiny tiny micro quadcopter with two inch props.
Frame
I found this iFlight iX2 frame on Amazon for $16.99. It’s a 100mm frame built for two inch props and a micro FPV camera.


Electronics
Assembly
I haven’t done much soldering over the last few years, so it was a little tough to start back up on this build. The electronics are all 20×20 mounts. They’re very, very small. So soldering wires to the pads on the flight controller was challenging.
I got the entire electronics stacked in the middle, but I’m probably going to need to rotate the FC 90 degrees to make it easier to access the USB port for configuration.
During assembly, when I’ve got the bird powered, the RunCam gets quite hot. Not sure that’s normal or not.
I’ve got the receiver bound to my transmitter and I can arm the props. I’m waiting on proper sized/powered batteries to fly it. I strapped a 3S 450 on it but it was waaaaay too big. I tried to liftoff with it but instead the props flew off and landed on my neighbor’s roof!
Maiden Soon
I hope to do a true maiden flight in the next couple of days. Stay tuned.