Drone and UAV Technology Reviews, Articles, News, Build Logs
Following the last post I had to take the hexacopter offline and tear it apart in the shop. Fortunately I found a way to take the one loose arm off and fix it, without having to tear apart the entire bird. That would have been a real pain.
When reassembling, I used some slightly different and thicker double sided tape for the SuperX flight controller. I also was able to clean up some of the wiring.
The first test flight (video highlights below) was quite amazing. First I was amazed that the thing even flew. In fairly strong winds it flew very well.
The video above is nearly flawless. I’ve been working toward this for so long. I’m thrilled to be at this point in the development of this platform.
Upon examining my flight logs I found that the vibrations this time were the absolute best and lowest I’ve ever achieved. Perhaps the arm was loosening causing some of the old vibrations or perhaps the thicker and spongier tape holding the flight controller on made the difference? Perhaps both.
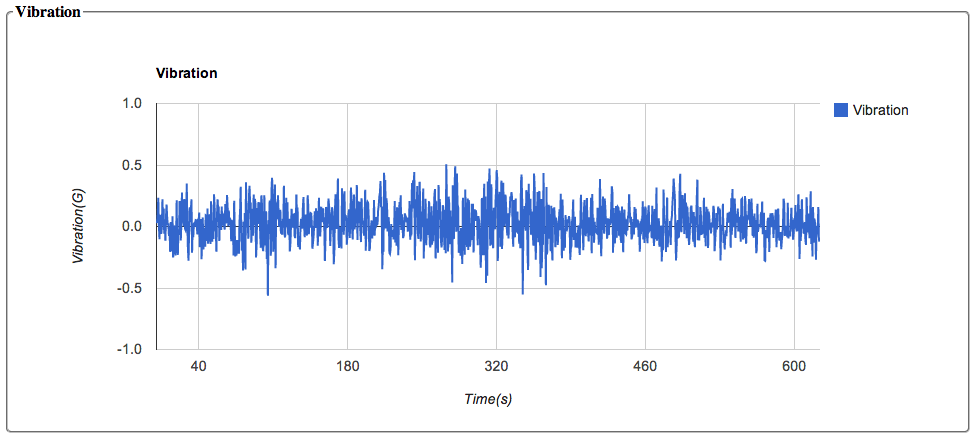
Whatever the reason, the results are fantastic. All I need to work on now with the build is lowering the gimbal a bit to get the props and arms out of the camera frame.
One other slightly irritating thing I fixed was the landing gear. One leg was slipping/rotating like arm #5. That’s all fixed too. Once again, another possible small source of vibration.
Hope to get more batteries and and FPV system soon.
You must be logged in to post a comment.