Drone and UAV Technology Reviews, Articles, News, Build Logs
Flew the Cinesplore cinewhoop outside for the first time today. Sure flies different than a 5″ freestyle quad. It was “listing” to one side. Probably need to recalibrate the gyro.

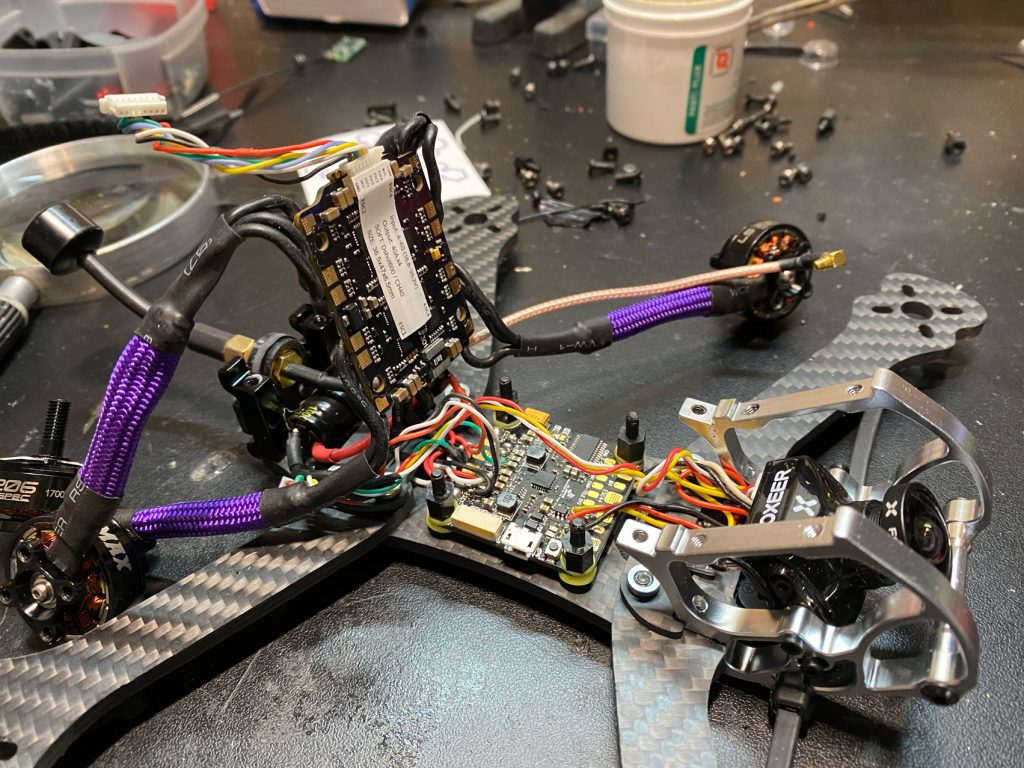
Also didn’t have any BF OSD stuff working in the DJI goggles. Need to check the BF setup. The video from the GoPro looked good, way better than the goggles. The antenna is way too short. Barely above the battery. It reduces the range. Need the longer antenna to get it higher above the battery.
I’m jumping on the cinewhoop bandwagon in hopes of capturing some nice, slower motion, cinematic GoPro video. After a lot of research I chose the Cinesplore frame. Below are some pictures of the frame. I’m waiting for parts to come in to continue the build.



This project has been a great, but frustrating learning experience. I started off with the hopes of designing and printing my own 3D printed frame for a 5″ FPV quadcopter. I originally designed it to be a 4S setup so I could use the motors I received in my last and final FPVCrate. FPVCrate is a drone part subscription service. First problem, one of the motors turned out to be bad, and I fried two separate 4in1 ESC’s. Talk about mad!


After resolving the motor issue, I ended up switching to 6S power and discarding the 4S motors. I went with some very cheap EMAX motors I found on closeout. Had to wait for the slow boat from China, but the 9 motors eventually arrived. With motors in hand I pulled all the electronics off the 4S and installed the new motors, upgrading to 6S.
The maiden flight was interesting. It flew for about 13 seconds but something wasn’t right. When I picked up the quad the ESC and motors were so hot they were literally melting the 3D printed frame. I eventually concluded that the frame was not stable enough, causing micro-vibrations. Those vibrations caused the flight controller to try to over-compensate and nearly fried the motors.
Rooster
At that point I figured a 3D printed racing drone frame was not the way to go. So I looked around and found a cheap clone Rooster frame on Amazon for $28. It was very highly rated and for good reason. It is solid.

I had two more hurdles to jump though. During the rooster build process I found that I had one more bad motor and a defective ESC. After replacing both the motor and ESC, the bird finally flew.
I took the quad out to a park and was thrilled to find that it really ripped was very agile. But there was one problem left to solve, no on screen display (OSD). At that point I realized I’d wired the camera directly to the video transmitter.
Oops. So I had to rip the whole thing apart to rewire that part. Another park flight is coming, but now I’m fairly sure the quad is done.
Parts