Drone and UAV Technology Reviews, Articles, News, Build Logs
Following the last post I had to take the hexacopter offline and tear it apart in the shop. Fortunately I found a way to take the one loose arm off and fix it, without having to tear apart the entire bird. That would have been a real pain.
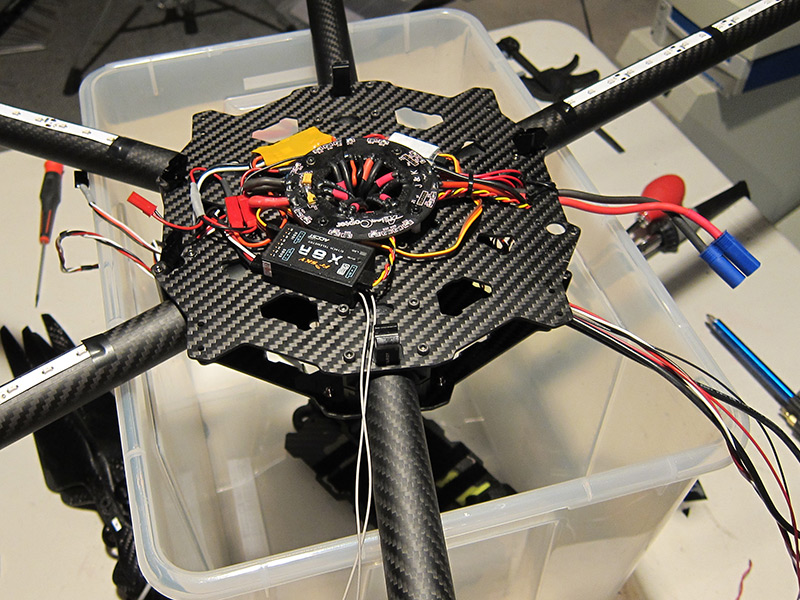
When reassembling, I used some slightly different and thicker double sided tape for the SuperX flight controller. I also was able to clean up some of the wiring.
The first test flight (video highlights below) was quite amazing. First I was amazed that the thing even flew. In fairly strong winds it flew very well.
The video above is nearly flawless. I’ve been working toward this for so long. I’m thrilled to be at this point in the development of this platform.
Upon examining my flight logs I found that the vibrations this time were the absolute best and lowest I’ve ever achieved. Perhaps the arm was loosening causing some of the old vibrations or perhaps the thicker and spongier tape holding the flight controller on made the difference? Perhaps both.
Whatever the reason, the results are fantastic. All I need to work on now with the build is lowering the gimbal a bit to get the props and arms out of the camera frame.
One other slightly irritating thing I fixed was the landing gear. One leg was slipping/rotating like arm #5. That’s all fixed too. Once again, another possible small source of vibration.
Hope to get more batteries and and FPV system soon.
After a great flight which produced the best video quality yet, I noticed motor #5 was crooked on my big hexacopter. Having just tweaked the motors and reset them to check their level, I figured maybe I didn’t tighten the motor mount screws tight enough. Not the case. The whole arm turned in place.
This is VERY bad. If that arm twists far enough the rotor would be pointing the wrong direction and the flight controller would try to compensate. Could mean a huge crash.
So tonight I bit the bullet, grounded the bird, and ripped the arm out. I had to desolder the ESC and motor, as well as the wire for the LED lights. What a pain but will be even more of a pain fishing the wires back through and resoldering the seven tiny connections.
 I epoxied the arm and will do a small screw in the side to keep it from slipping. I almost decided to do the other four foldable arms, but that might have meant ripping the WHOLE unit apart. So I’ll be keeping an eye on the other three foldable arms and hopefully this first one will give me a blueprint on how to do the rest as needed.
I epoxied the arm and will do a small screw in the side to keep it from slipping. I almost decided to do the other four foldable arms, but that might have meant ripping the WHOLE unit apart. So I’ll be keeping an eye on the other three foldable arms and hopefully this first one will give me a blueprint on how to do the rest as needed.
I’ve been working very hard to eliminate the vibrations of my big hexacopter so that the aerial video is not vibrating, blurry and full of video jello. I decided after much reading that I should try to move the batteries and gimbal/camera to the center of the bird, rather than having the gimbal far forward and the batteries far back to act as a counterweight.
The results are dramatic, and better. My vibration levels have been greatly reduced and the bouncing and video problems are gone. I suspect that the “rail” system used on this bird to hang the gimbal is a little too loose and when the gimbal is way out front the vibrations are magnified.
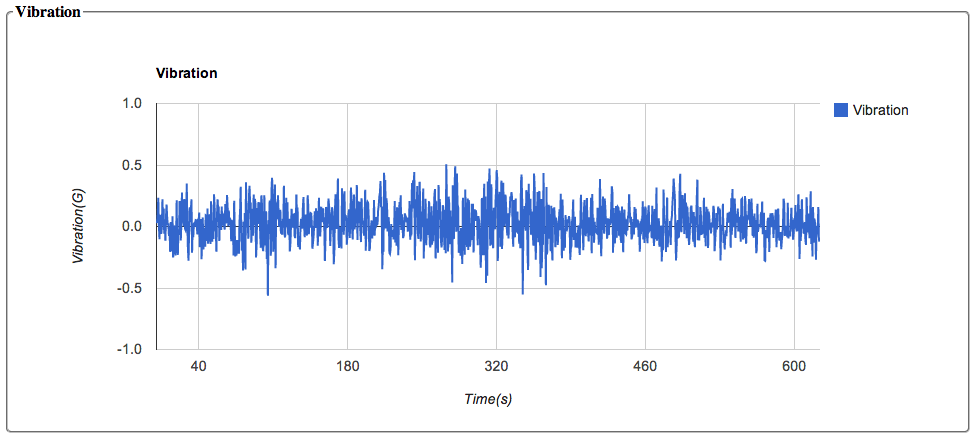
Check the log files below. This first one is the old setup with battery back and gimbal front. Note the vibration levels.
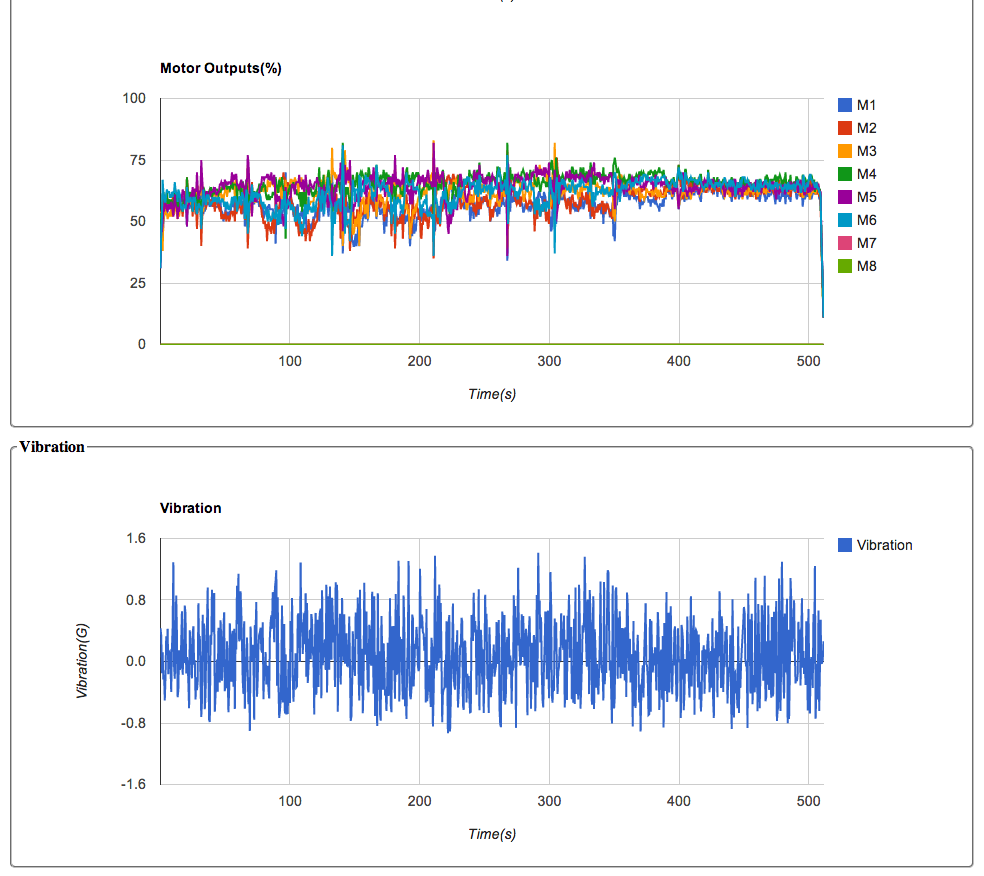
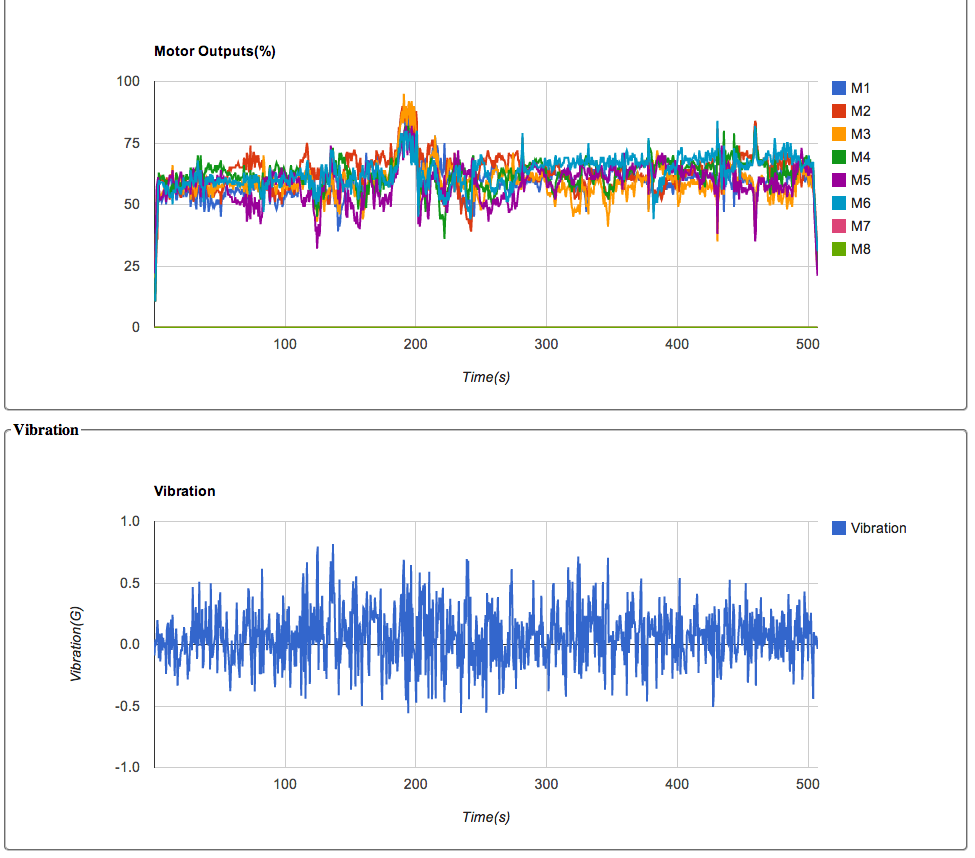
Now look at the new setup. No change in any electrical settings. Just moving the batteries top-center and gimbal bottom-center.
Casualties
Due to the change in setup I had to modify the placement of some items, and simply get rid of others. The neat clear dome which looks SO cool had to go. The batteries on top make it so the dome will not fit. I also was able to remove two of the larger battery mounts, which attach to the rails. I was able to remove a couple of different cables which became unnecessary with the removal of the dome. Lastly, I removed the FrSky GPS telemetry unit, which has never once locked in on a satellite.
The good thing about removing items is making the weight of the unit lighter, which results in longer flight times. I also think perhaps those rail mounted battery mounts were contributing to the vibration.

The Newest Setup
There’s a small problem with this setup which did not happen with the previous setup. Since the gimbal has moved backward to the center of gravity, the arms and blades of the hexacopter are sometimes visible if the copter is banking or braking enough. I will have to lower the gimbal down via some kind of spacers. How far I’m not sure. I’ll have to just do a simple test by holding the camera with my hands and looking in the viewfinder.