Drone and UAV Technology Reviews, Articles, News, Build Logs
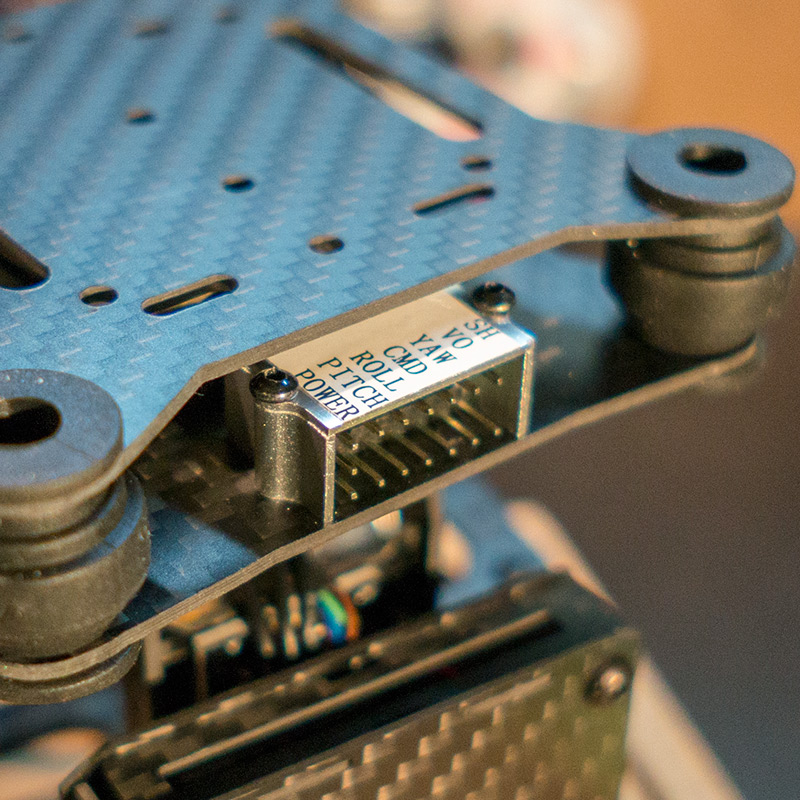
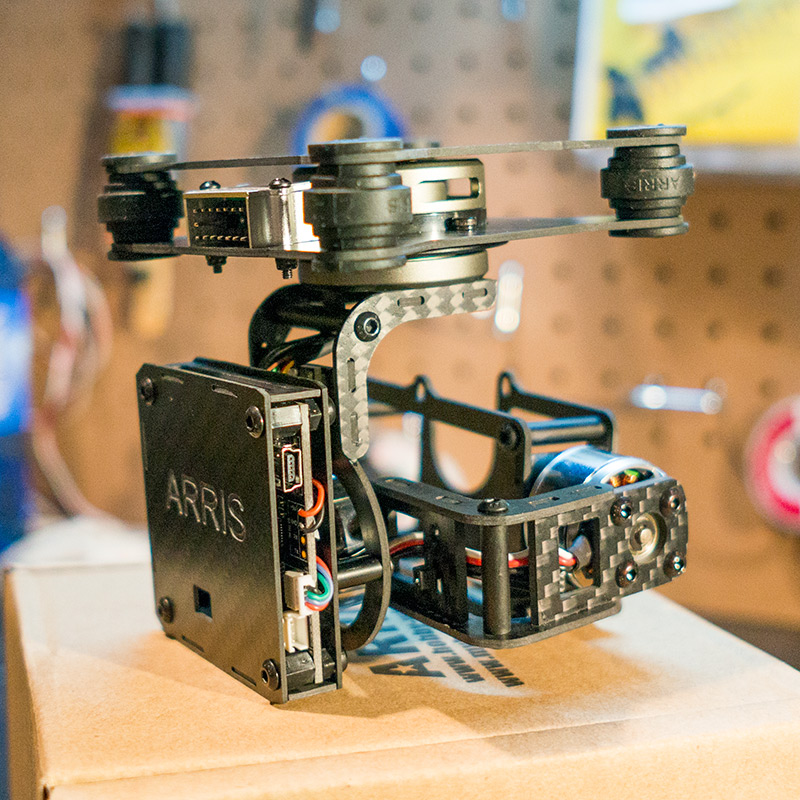
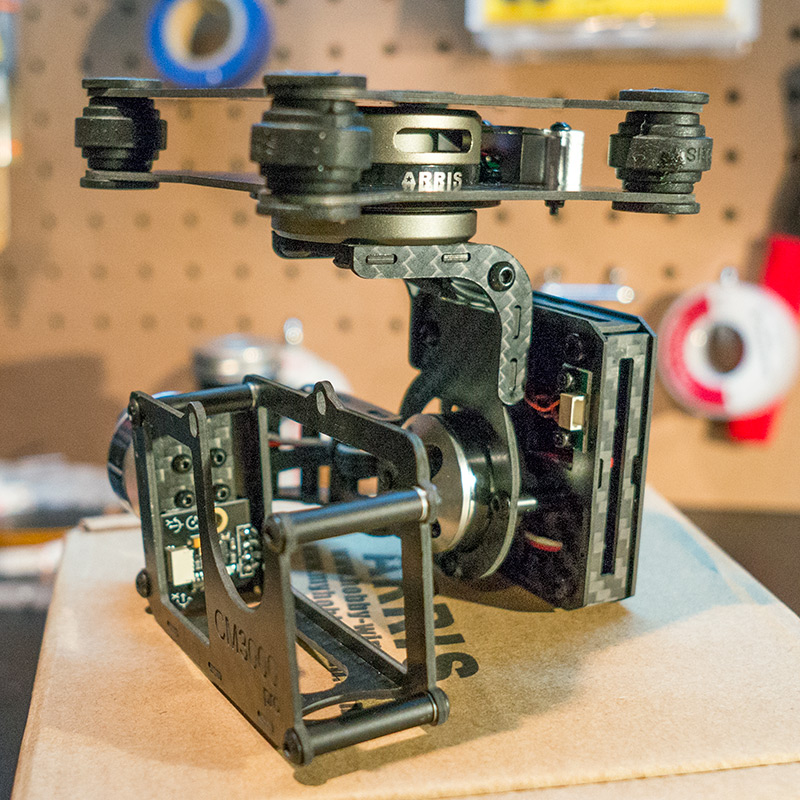
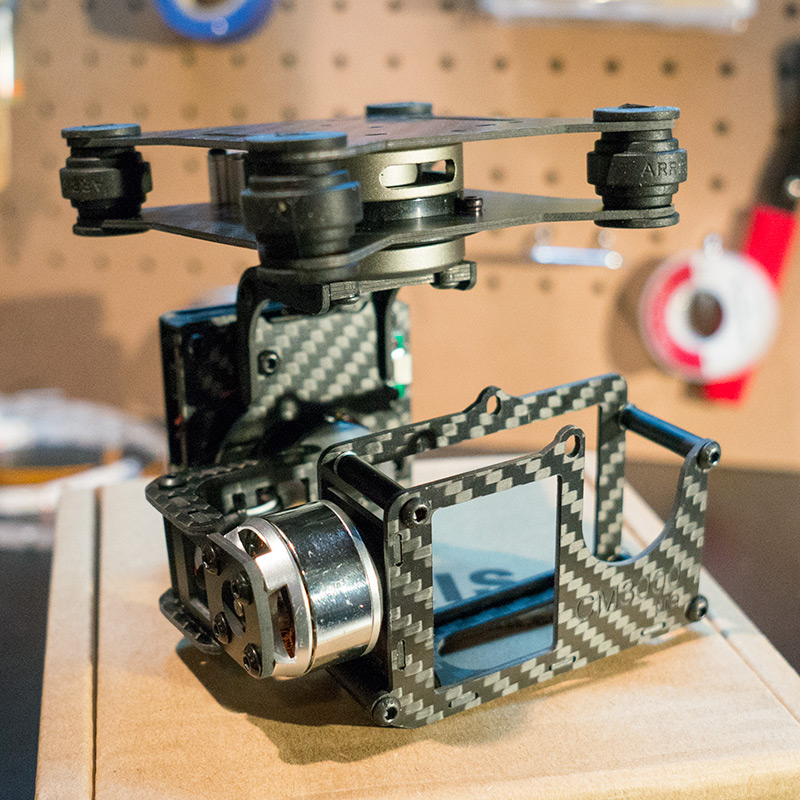
I just got in the new Arris CM3000 Pro gimbal for GoPro cameras. I actually won this in a Facebook contest many thanks to Hobby-Wing! Here are a few photos of the gimbal. As an owner of the CM3000, this one is built much better and has better features for sure. It powered up great and I’ll do a test flight soon. Stay tuned for my full review.

Arris CM3000 Pro Gimbal
Arris CM3000 Pro Gimbal
Arris CM3000 Pro Gimbal
Arris CM3000 Pro Gimbal
Arris CM3000 Pro Gimbal
 This is geeky beyond measure….
This is geeky beyond measure….
I’m in the “laboratory” getting ready for an aerial shoot tomorrow. My hexacopter is good to go, but in case I need another flight or backup I was getting my DJI Phantom ready to fly. I had just balanced some new props and was walking up the stairs when the doorbell rang. Quad in hand, I answered the door. It was a neighbor kid.
“My rocket is on your roof.”
He had launched a rocket from his yard and miscalculated the wind. The parachute was hanging off the edge of the roof and the rocket was on the roof. I told him I’d be happy to try taking the Phantom up there and seeing if I could get close enough for the wind from the props to blow the rocket down. He, his father, and three other neighbor kids thought that was a brilliant idea.
I was a little worried. I just spent a bunch of money on new props. I’d hate to break them AND leave the damn Phantom on the roof.
I piloted up to the roof and positioned the quad above the rocket. It was a bit breezy so I had to manipulate it a bit to keep it in position, despite being in GPS mode (that’s another discussion). I lowered to the point where the prop wash hit the rocket and voila! The rocket blew down and I was the hero of the neighborhood.
The neighbor kids raved how cool the Phantom was to which I said, “you should see the BIG bird!”
I then busted out the big hexacopter and did a neighborhood flight with a very attentive audience. They loved it, and I got a test flight in on the big bird after having to reset the gimbal settings.
After a recent road trip which I brought my Phantom and my hexacopter, I found that the Arris CM3000 3-axis camera gimbal on the Phantom became stuck. The pitch motor would only move about 1/16 of an inch. Something was blocking it. I didn’t want to give it too much force for fear of breaking it.
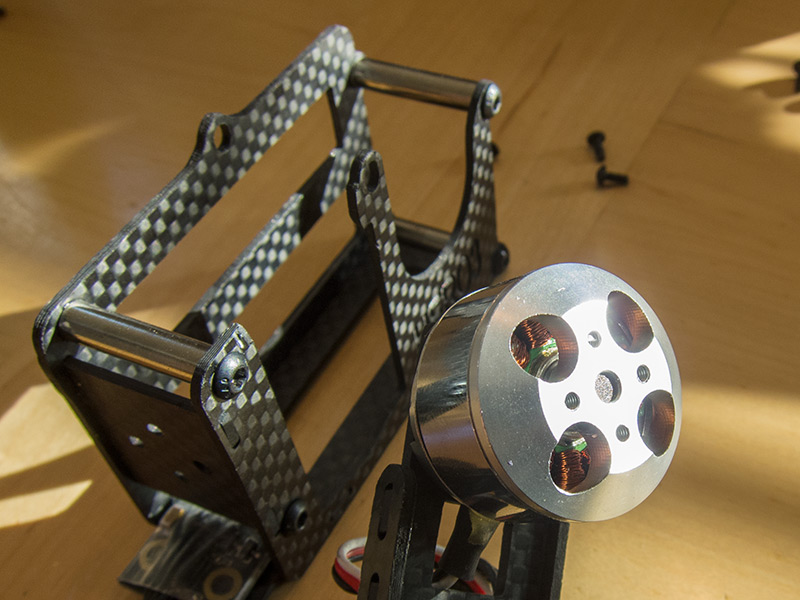
I found a replacement for the motor online for about $18. But before I ordered one from China and had to wait 17 million weeks for it to arrive, I thought I’d tear apart the broken brushless motor and see if I could fix it.
I’ve never torn apart a brushless motor before. It was not hard. I popped the clip on the drive shaft and unscrewed the shaft screw. Then the outer cover came off with a little force. It did not want to come out because of how strong the magnets were.

The problem was visibly obvious as soon as I had the cover off. A couple of the magnets had broken and a piece of them came off, lodging between two other magnets (above). I’m guessing the magnets were cracked during a Phantom crash, and eventually the piece broke loose. You can see the loose chunk below:

I cleaned out the debris, put it back together and it appears to be working again. I just hand tested it though. A real flight test is up next.